常见问题
机器人硬件相关
OriginBot从哪里购买
OriginBot智能机器人开源套件唯一销售平台:古月学院→套件购买链接
电池接口较紧,不好插入
为保障系统供电稳定,满足总电源瞬时高功率输出,OriginBot在电源接口的选型上采用了T型接口。该接口全新状态下连接较紧,请大家在安装的时候使用巧劲发力,谨慎操作。
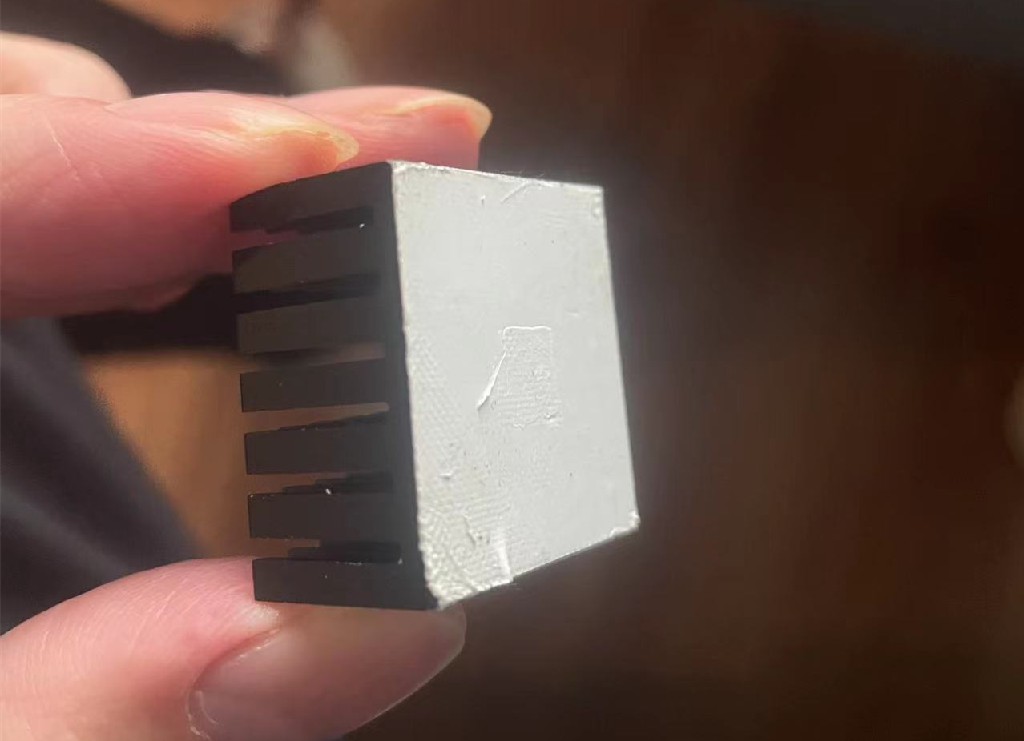
如何安装处理器的散热片
撕掉散热片背面蓝色塑料片,白色的是导热贴,尽量让RDK X3(旭日X3派)上的核心SoC处于导热贴的正中间,然后按压粘贴即可。
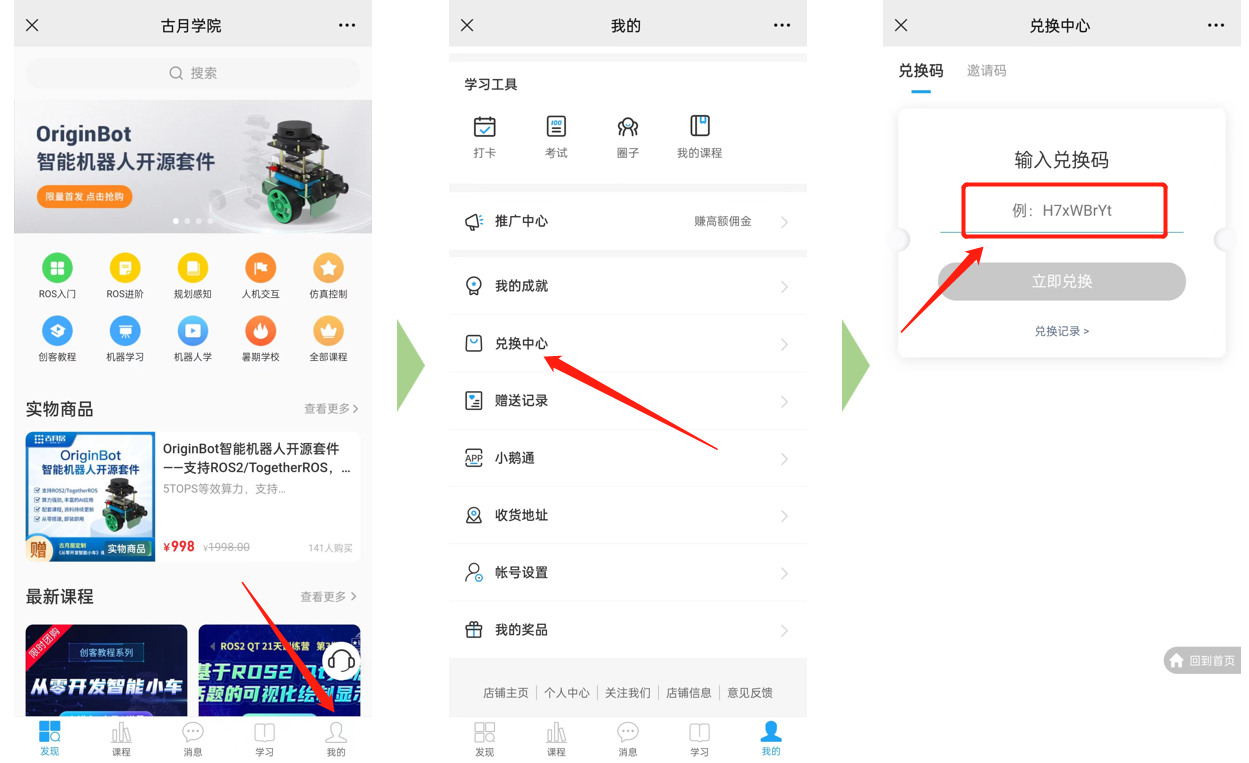
套件配套的课程卡如何使用
刮开套件中配套的课程兑换卡,找到兑换码。登录“古月居”微信公众号,菜单栏中点击“古月学院”,进入后点击底部“我的”,然后点击兑换中心,输入兑换码确认后即可兑换成功,在“我的课程”中就可以学习兑换成功的课程。
蜂鸣器一直作响
如果在使用OriginBot的过程中,发现蜂鸣器一直作响,不用担心,这是控制器默认的电池保护程序,当电压低于9.6V时,蜂鸣器就会一直作响,请及时关机充电。
另外在烧写控制固件时,如使用PC通过固件下载口给控制器供电,烧写固件后的电压也会低于9.6V,根据电池保护程序,蜂鸣器也会作响,重新连接电池后,即可恢复正常。
机器人上电后雷达一直旋转
由于激光雷达自身的特性,上电后就会一直旋转,如果暂时使用不到,可以把雷达的USB线先拔掉,使用时再连接。
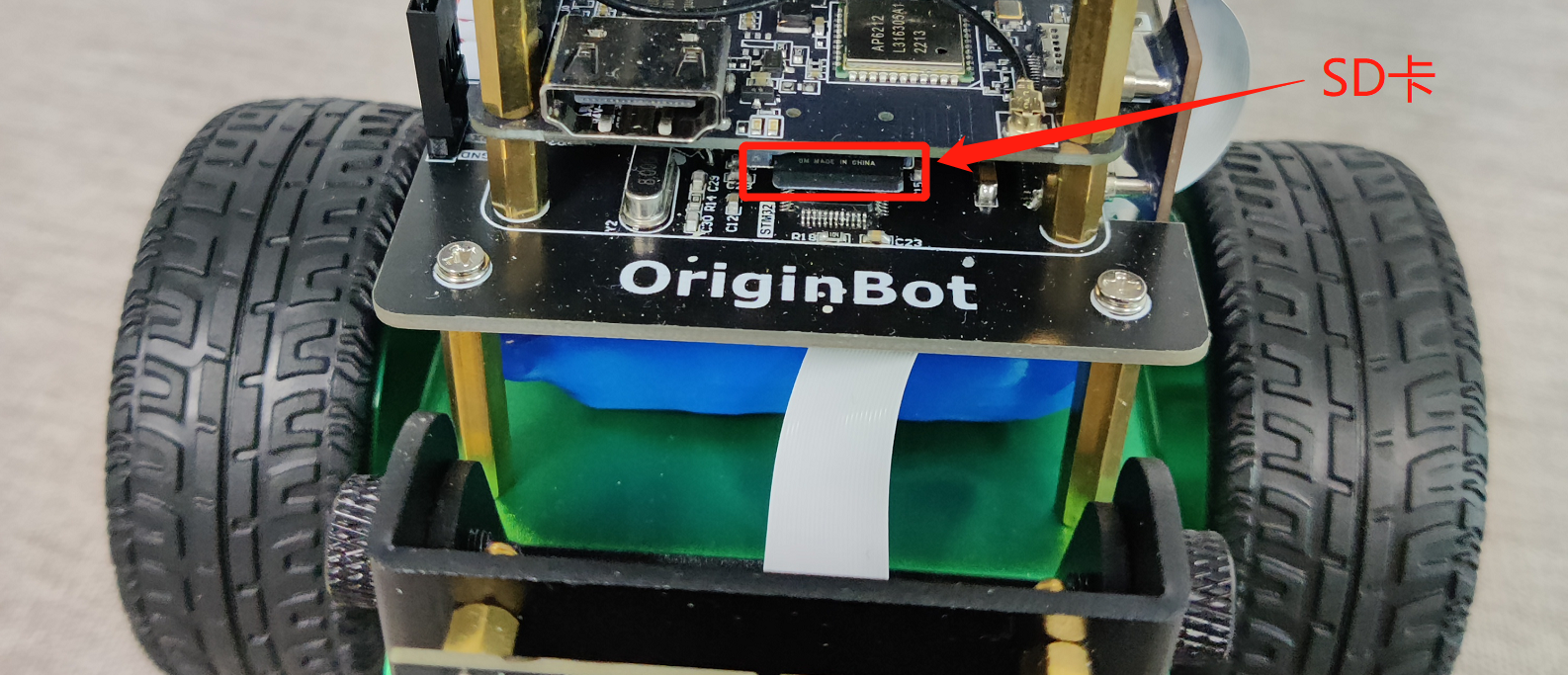
机器人的SD卡插在什么位置
SD卡烧写镜像后,插在机器人前端、RDK X3(旭日X3派)板卡背面的卡槽中。
机器人可以边充电边使用么
不可以,机器人控制器上的充电电路是按照关机状态设计的,所以充电时,请关闭机器人电源开关,带充电完毕后,拔掉充电头,再进行使用。
如何确认机器人充电结束
请使用套件配套的充电器充电,充电器插头上有LED显示灯,红灯为正在充电中,绿灯为充电完毕。完整充满电的时长预计在3小时左右。
机器电机运动不正常
通过键盘控制机器人前后左右运行时,如果发现机器人某一侧电机不转,或者时转时不转,请通过以下方式检查: (1)检查机器人电机接线是否正确且牢固,包括电机端和驱动板端;
(2)机器人是差速运动,原地转弯时,如果速度过慢,内侧轮子有可能是不转的,这是正常现象;
(3)如果机器人在向前运动的过程中,某一侧轮子不转,或者时转时不转,请先参考控制器固件安装重新烧录固件后,再进行尝试;
如果问题依然存在,请联系小助手进行售后支持。
控制器板卡单独销售么
OriginBot控制器板卡暂时没有单独销售,但是原理图和PCB均开源,开发者可以自己投板制作。
视觉版可以升级为导航版么
官方没有提供差价升级服务,但是相关的元器件、模型、软件均开源,开发者可自行制作升级。
机器人失控怎么办
在二次开发过程中,如果ROS应用开发不当,可能会导致机器人失控,比如一直运动不停止等情况,此时可以拿起机器人,按一下控制器板卡上的复位键“RESET”,机器人底层运动功能即可复位,然后尽快关闭上位机的ROS应用节点。
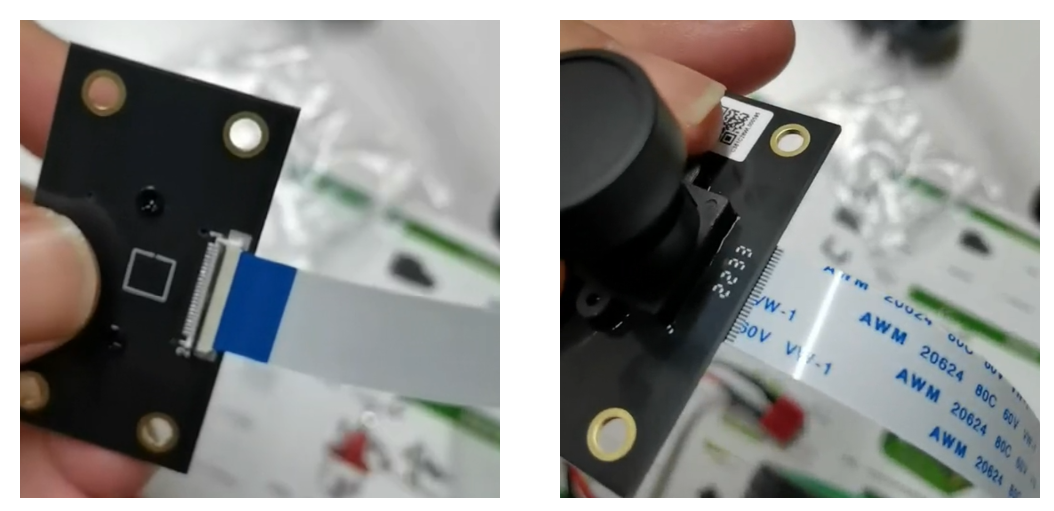
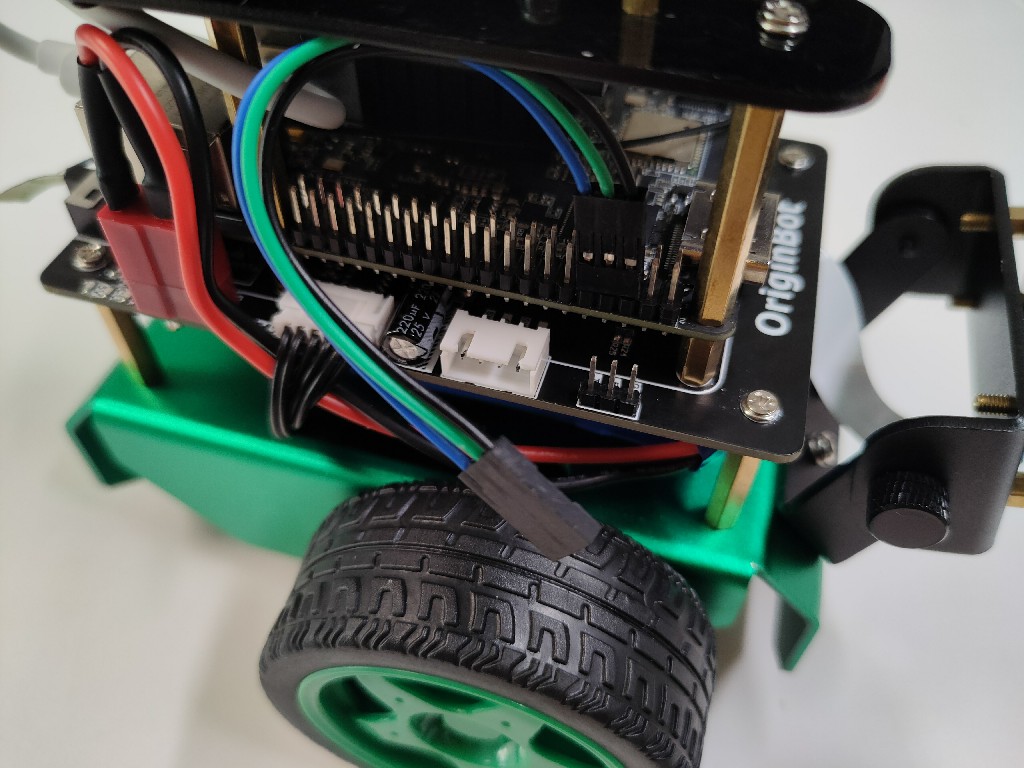
相机排线的金手指方向
如下图所示,金手指朝向PCB一侧,X3派上也一样。
镜像/固件烧写与启动
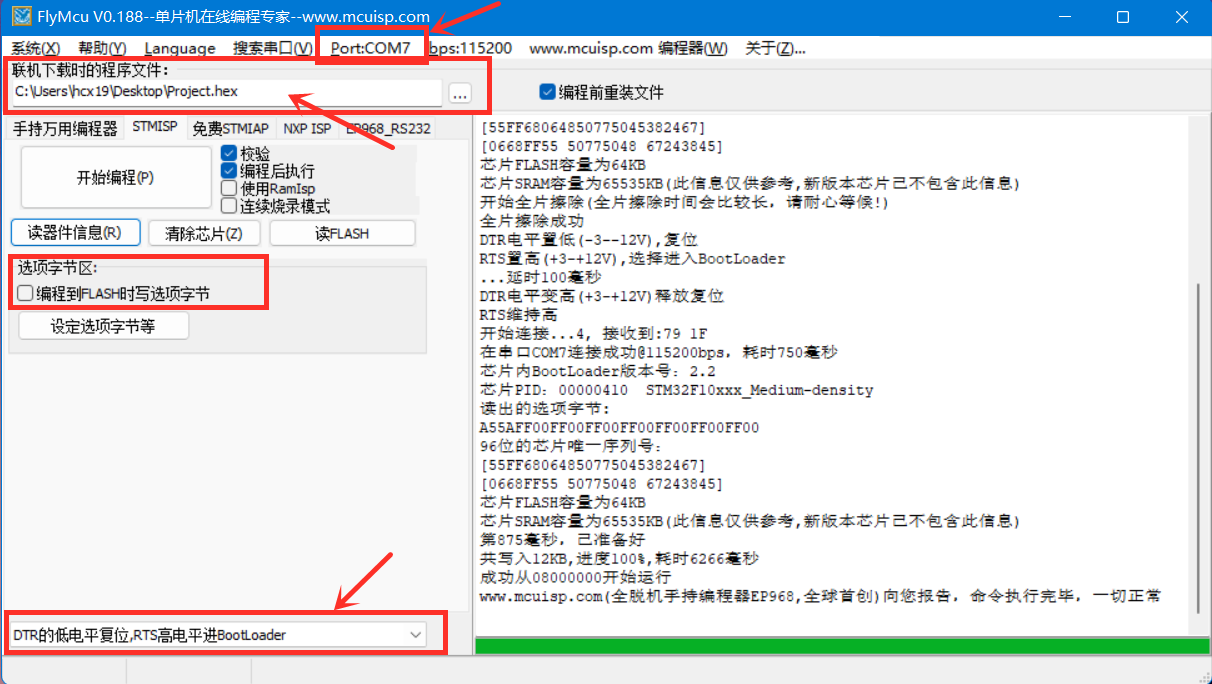
控制器固件烧写失败
通过“Burning”口给扩展板下载固件时,如遇到烧写失败,请检查以下问题:
(1)需要断开扩展板与旭日派的串口连接,否则将无法连接下载;
(2)检查FlyMcu软件中的配置:
- 固件文件选择正确;
- 下载固件的端口正确;
- 左下角复位选项选择正确;
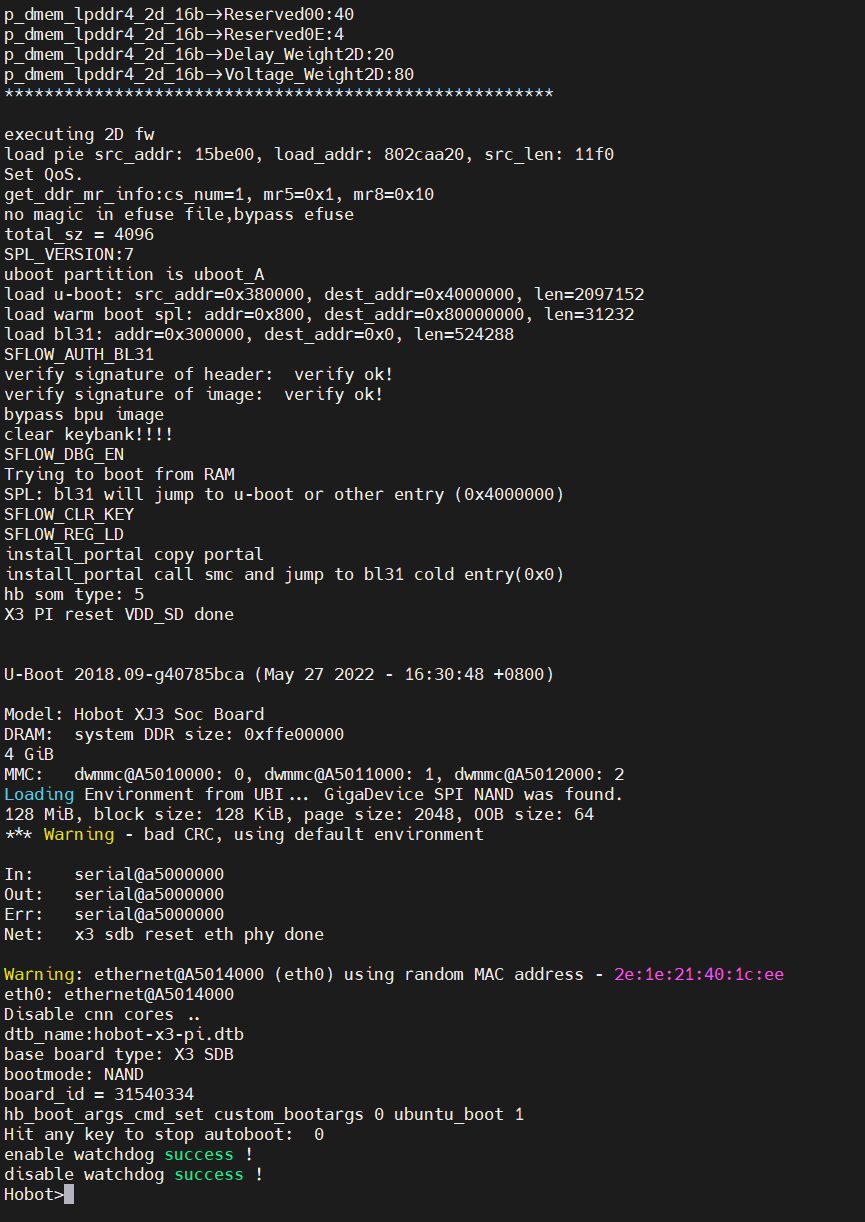
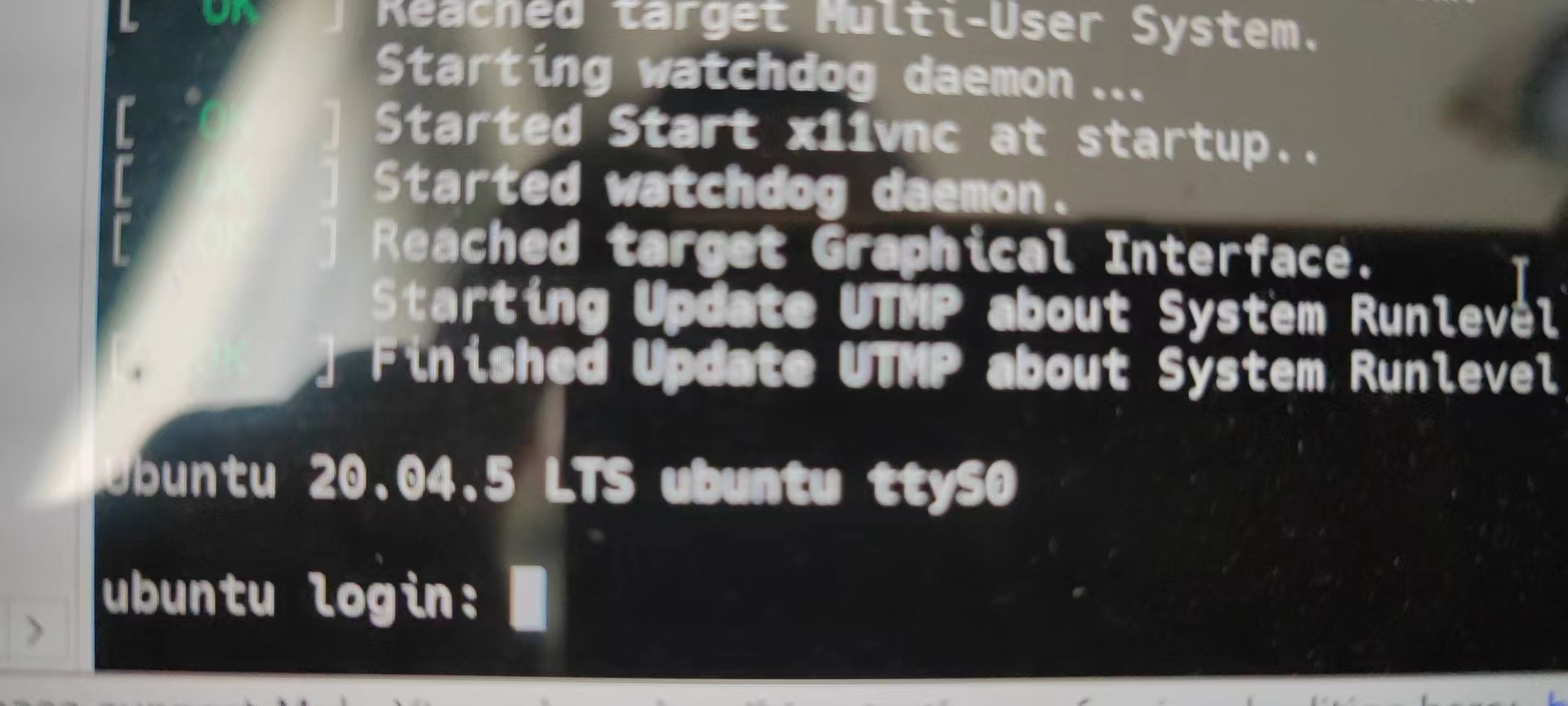
上电启动无法进入登录界面
烧写SD卡镜像后,启动旭日派时:
- 如果串口界面中不断输出uboot信息,无法进入ubuntu系统的登录界面,可能是因为板卡供电不足,请检查RDK X3(旭日X3派)的电源输入,确保使用控制器板卡通过typec转接板供电,或使用外接5V 2A以上电源对RDK X3(旭日X3派)的typec口供电。
- 如果如下图所示,停在uboot界面,说明板卡已经启动,但并没有加载sd卡镜像。请确认已经将SD卡正确的插入RDK X3(旭日X3派)的卡槽中,并且在启动过程中没有任何键盘输入。
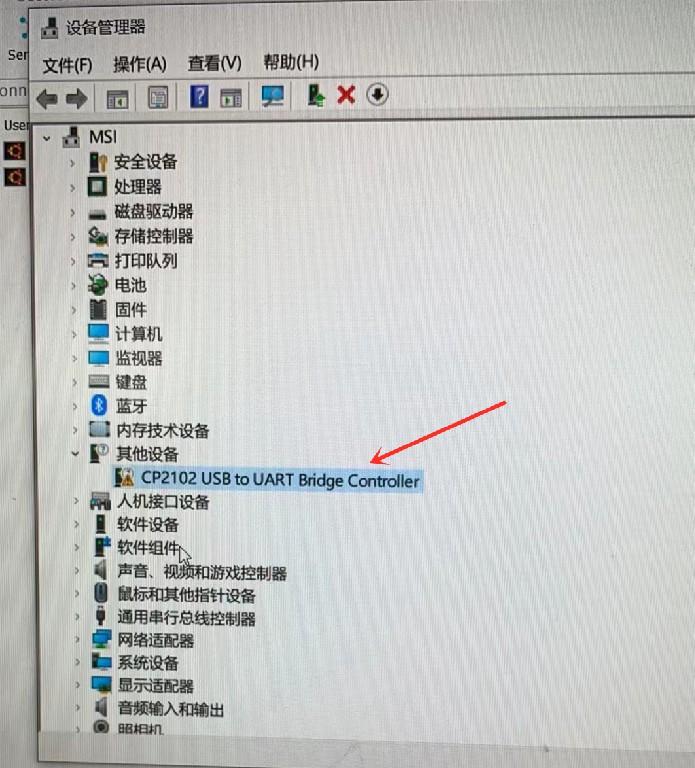
串口软件中找不到串口设备
连接好串口模块后,如果在串口软件的设备选择下拉框中没有找到设备,请右键在“我的电脑”中,打开“设备管理器”,确认系统是否已经安装串口模块的驱动。
如果显示如下,说明串口模块驱动未安装,点击此处下载串口驱动,解压后双击其中的dpinst64.exe进行安装,驱动安装完成后,再重新尝试通信。
串口软件里无法输入字符
连接好串口后,启动OriginBot,可以在串口通信软件中看到输出的日志信息和登录提示,但是无法输入字符:
(1)请检查串口线的连接,有输出信息说明串口的RX连接正确,有可能是TX和GND接反了。
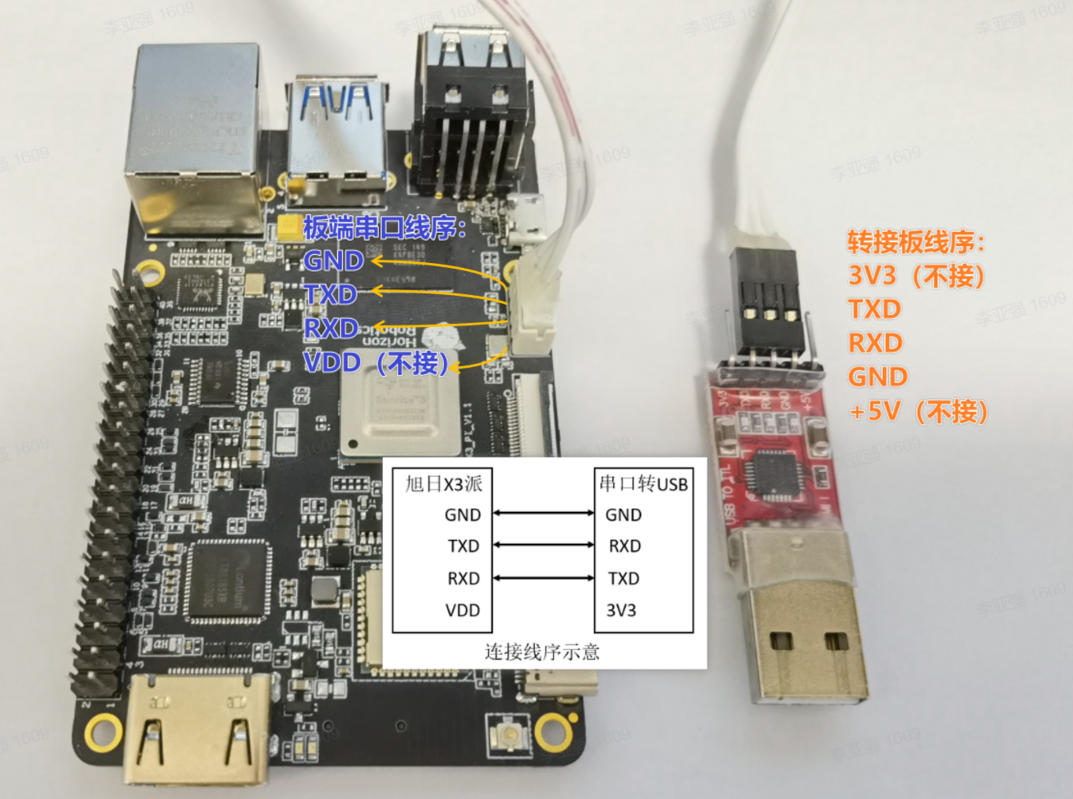
(2)确认使用的串口通信软件是否有远程交互功能,不能使用串口通信助手,而应该使用串口远程终端连接软件,如MobaXterm、TeraTerm等。
RDK X3有没有用户手册
RDK X3(旭日X3派)的基本使用可以参考RDK X3用户手册。
从哪下载FlyMcu软件
请参考常用软件下载页面。
从哪下载SD卡镜像烧写软件
请参考常用软件下载页面。
从哪下载串口驱动
请参考常用软件下载页面。
如何在线调试固件代码
需要使用stlink仿真器,连接控制器端的SWD接口,参考源码调试与下载进行操作。
HDMI连接显示器没有图像
OriginBot系统镜像采用Ubuntu 20.04 Server版本,本身不带有系统桌面,所有通过HDMI连接显示器后,之后显示默认的地平线logo信息,是正常现象。
SD卡的空间不足
OriginBot套件中配套的SD卡是32GB,正常使用情况下空间完全可以满足,如果发现空间和32GB不符,请确认:
(1)为了减少系统镜像文件的大小,SD卡系统镜像中的空闲空间已经被压缩,烧写完成后,请参考扩展SD卡空间进行操作;
(2)SD卡镜像中的文件格式是EXT4,在windows中无法完全读取,会导致看到的磁盘空间只有几百兆,是正常现象,可以安装相应的软件读取,或者在Ubuntu系统下读取。
SD卡无法读写
部分SD卡在操作后会出现分区表损坏等情况,造成无法读写SD卡的情况,此时需要进行格式化的操作才可以,具体步骤如下: (1)在桌面上的“此电脑”图标上右键,管理,磁盘管理,选择SD卡所对应的磁盘。 (2)删除SD卡磁盘上的所有分区,在分区对应的位置右键,即可看到删除选项。 (3)新建分区,在删除完毕的未分配部分右键,新建简单卷,后续直接全部下一步,确认即可。 (4)最后在文件管理中能正确看到SD卡的分区并可以进行读写,即为正常。
基础功能使用
手柄连接后无法显示设备号
由于不同品牌手柄的底层驱动可能不同,部分手柄连接到RDK X3(旭日X3派)中无法驱动。如果使用“ls /dev/input/”命令后,无法看到以“js+数字”标记的设备,则说明该手柄无法被RDK X3(旭日X3派)的Ubuntu系统驱动。
目前已经测试通过的手柄型号有:
(待补充更多型号)
如遇到无法驱动的情况,可以将手柄插到PC端,通过ROS2分布式通信的方式,控制机器人运动。
相机启动失败
OriginBot采用MIPI相机作为视觉传感器,连接线缆为软质排线,两侧接口容易连接不到位。
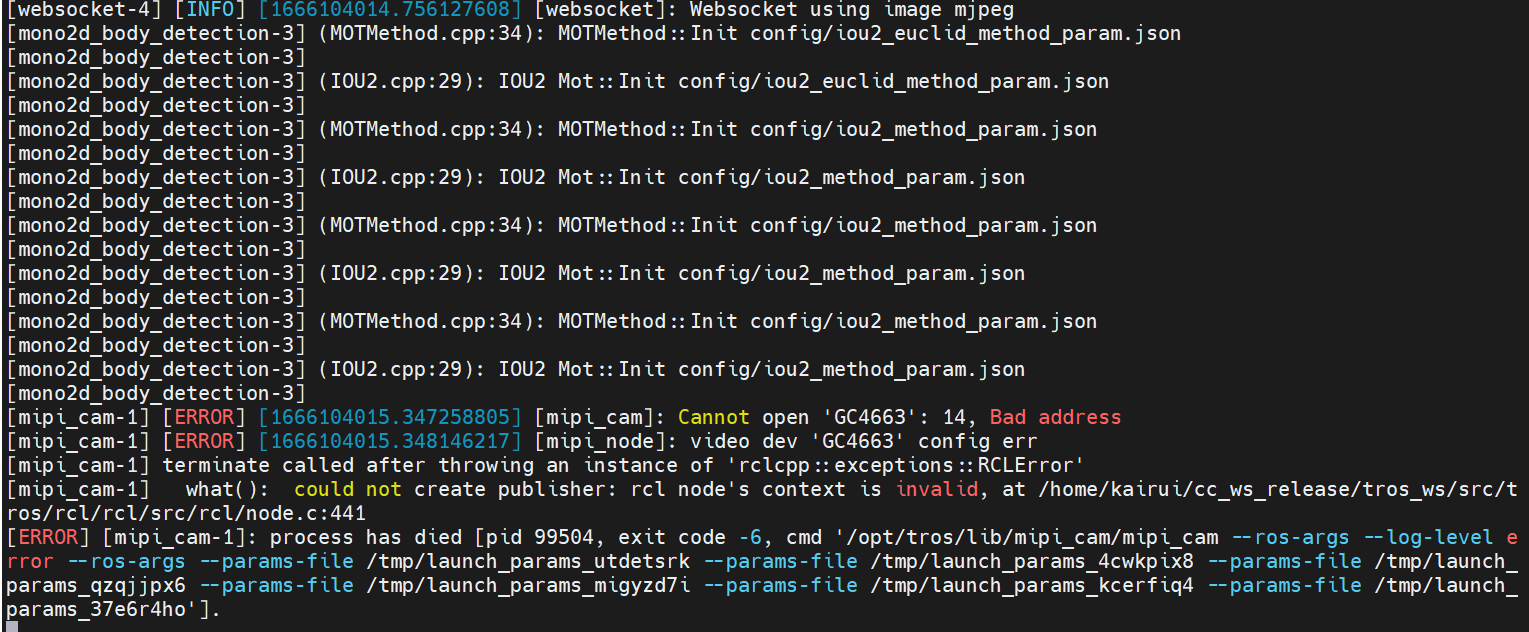
如果相机启动失败,请通过以下方式进行问题排查:
(1)重新连接两侧排线,注意接口保持平整,并且插入到接口底部,确认连接无误后,再重新尝试,注意排线不能热插拔,需要关机后再操作;
(2)连接好排线后,使用图中的命令进行查看,如果相机未连接,请重复上一步操作,或者更换排线操作;
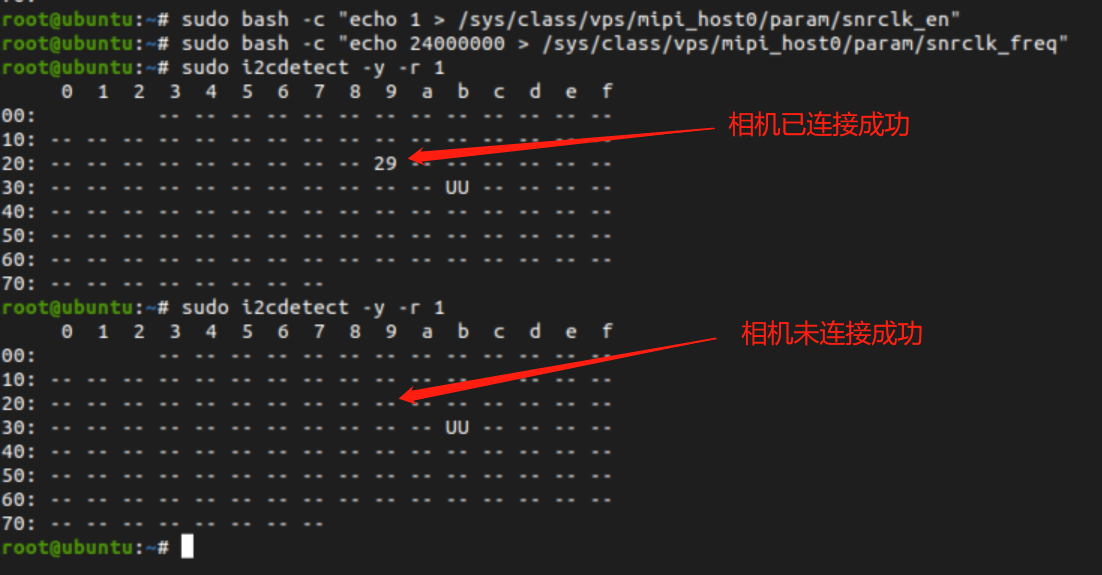
(3)确认是否有其他程序已经占用相机使用权,如果有,请关闭其他程序后再重新尝试;
PC端的上位机代码如何编译
请参考下载/编译PC端功能包的步骤操作。
VSCode无法连接机器人
请排查以下可能存在的问题:
(1)运行VSCode的PC机是否和机器人处于同一个局域网下,即连接了同一个路由器;
(2)PC机和机器人之间是否可以通过“ping+对方的IP地址”连接成功;
(3)通过VSCode连接机器人时填写的IP地址、用户名、密码、命令行字符等是否有误。
VSCode在Ubuntu下如何安装
请参考安装VSCode进行操作。
机器人可以连接USB相机么
可以,具体使用方法可以参考地平线机器人开发平台使用手册:USB图像采集
机器人的IP地址会发生变化
(1)有线网络:OriginBot镜像中已经设置静态IP地址,为192.168.1.10,使用时参考SSH远程登录的视频说明进行配置;
(2)无线网络:如果连接的路由器开启了DHCP(动态主机配置协议),机器人每次连接后的IP地址可能会发生变化,如果需要固定IP,请上网搜索“Linux 无线网络 静态IP设置”,参考配置。
ROS2与TogetheROS
ROS2与TogetheROS软链接
系统镜像已经完成常用ROS2功能包的安装,如有新安装的ROS2包,安装后需要完成和tros的软链接,才能使用;
$ cd /opt/tros
## 使用/opt/tros目录下的create_soft_link.py创建ROS package至TogetheROS的软链接
$ python3 create_soft_link.py --foxy /opt/ros/foxy/ --tros /opt/tros
系统更新覆盖配置文件
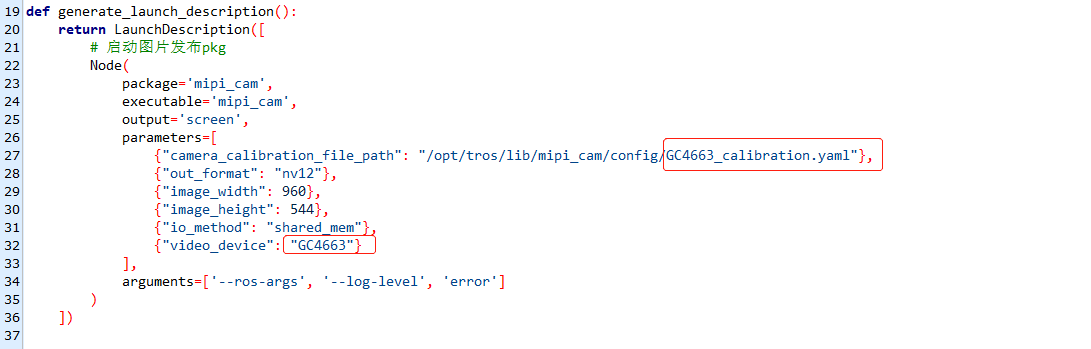
如果手动使用upgrade更新系统,有可能会更新tros系统,致使原有镜像中相机相关的配置被覆盖,可使用如下方法恢复:
- 确认“/opt/tros/share/websocket/launch/hobot_websocket.launch.py”路径中的相机型号和标定文件是“GC4663”,如果不是,请修改:
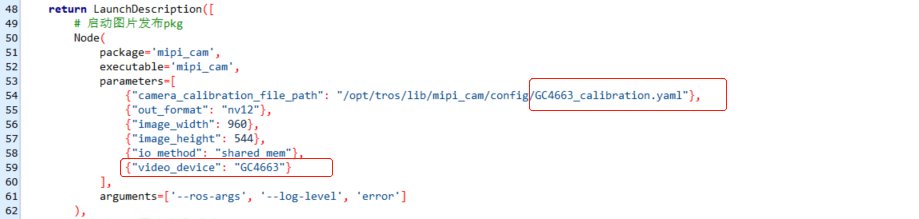
- 确认“/opt/tros/share/mipi_cam/launch/mipi_cam.launch.py”路径中的相机型号和标定文件是“GC4663”,如果不是,请修改:
ROS2密钥获取失败或无反应
由于ROS官方软件源在国内经常访问失败,ROS/ROS2安装或更新时经常遇到密钥获取失败、下载速度慢等问题,可以参考下文使用国内的软件源安装或更新。
PC端如何安装ROS2
请参考ROS2系统安装步骤操作
OriginBot代码PC上无法编译
OriginBot代码仓库中的部分功能包需要调用RDK X3(旭日X3派)中的软件资源,所以在PC端无法完整编译通过,如有需要,可以将需要使用的文件或者单独的功能包拷贝到PC端编译使用。
TogetheROS开源么
开源,可以参考地平线机器人平台的用户手册。
ROS1和ROS2可以并存么
可以,只需要通过环境变量的设置调用需要使用的ROS版本即可。
应用功能
Rviz上位机无法可视化信息
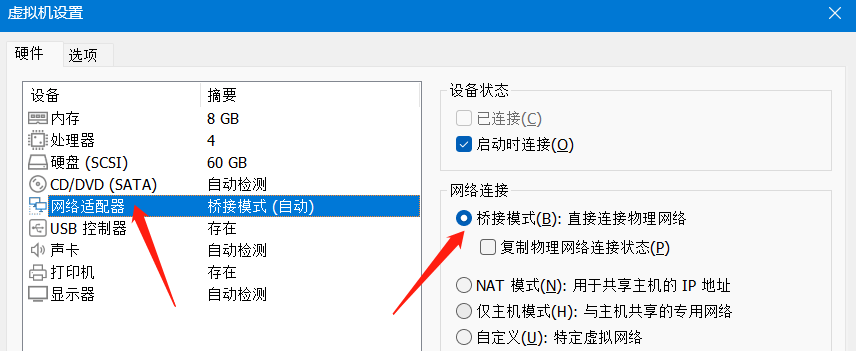
在运行应用功能时,上位机Rviz中无法显示TF、地图等可视化信息,请检查确认:
(1)机器人和PC机是否处于同一局域网环境下,双方可以通过IP地址互相ping通;
(2)如果使用虚拟机运行Ubuntu系统,请确认虚拟机的网络配置已设置为桥接模式;
(3)测试是否能通信
ros2提供了网络检查CLI(命令行接口)工具,multicast ,我们可以使用multicast执行对两个ros2终端进行测试。
首先在电脑端我们启动接收组播指令
在 OriginBot 上,我们发送一个组播,
如果收到消息就可以多机通信当电脑端和 OriginBot 的 ROS_DOMAIN_ID 相同时 (默认都为0),就可以通过话题等互相通信。
参考链接: 不设置主从机,看ROS2如何进行多机通信
导航应用在Rviz看不到信息
运行OriginBot导航应用后,在启动的Rviz中看不到地图和机器人的信息。
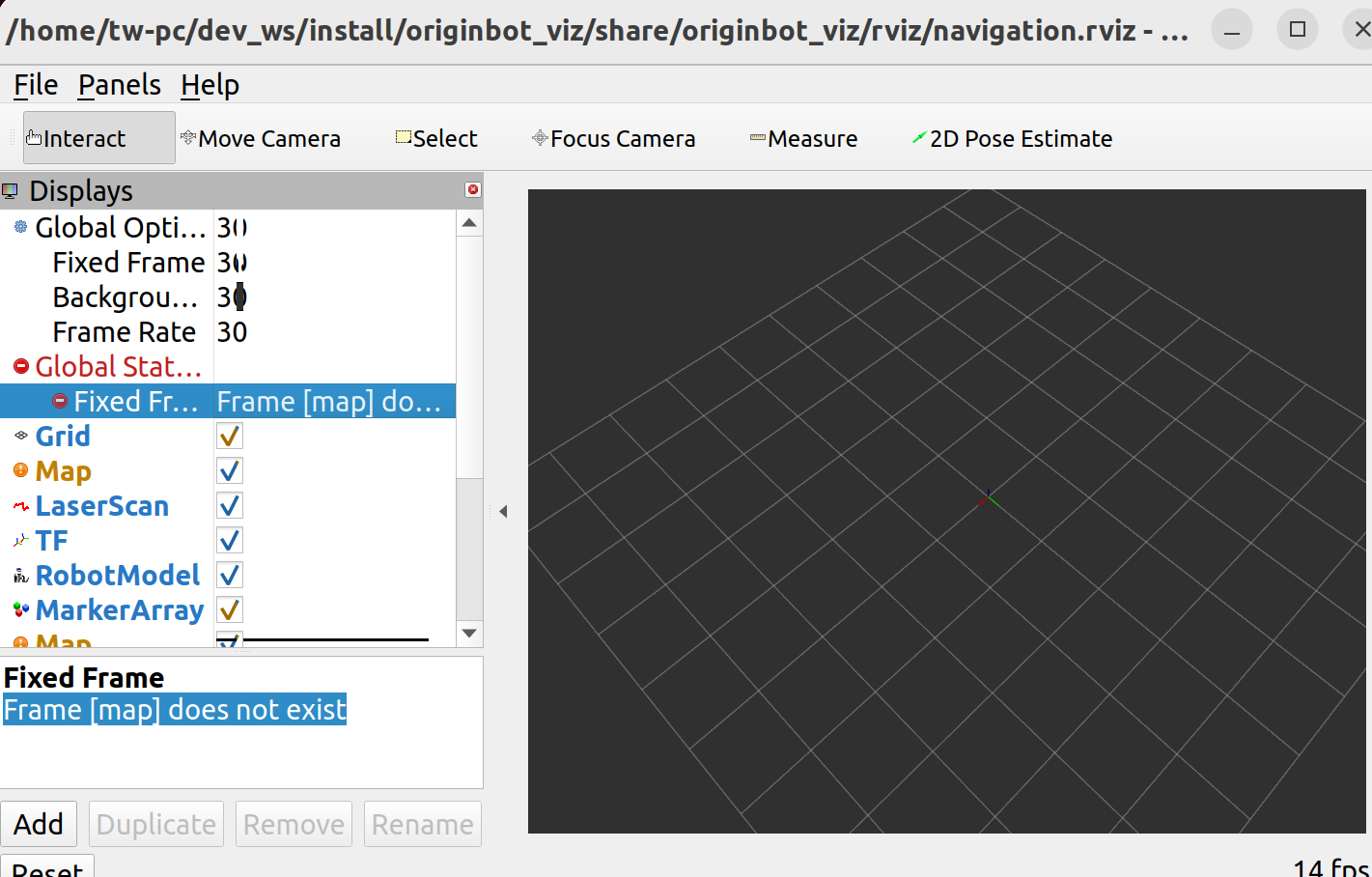
此时请使用Ctrl+C关闭PC端的Rviz上位机,以及机器人端的导航功能,然后先运行PC端的Rviz上位机指令,再启动机器人端的导航功能,此时Rviz中就可以显示地图和TF信息了。
如果还未显示,可继续重复该操作2~3次。
相机图像传输卡顿严重
ROS2 Foxy默认使用的是fastdds,在图像传输的场景下,会受到限制,此时我们可以切换为cyclonedds。
注意在发送图像的节点和接收图像的节点,均需要配置DDS为cyclonedds,请参考启动ROS相机驱动与查看可视化图像部分的内容,在启动节点前,通过以下命令切换当前终端使用的DDS:
$ export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
$ export CYCLONEDDS_URI='<CycloneDDS><Domain><General><NetworkInterfaceAddress>wlan0</NetworkInterfaceAddress></General></Domain></CycloneDDS>'
