虚拟仿真
Hint
操作环境及软硬件配置如下:
- PC:Ubuntu (≥20.04) + ROS2 (≥Foxy)
开发环境配置
在PC端安装好Ubuntu+ROS2系统,并且完成originbot_desktop代码仓库的下载和编译。
具体操作方法请见:下载/编译PC端功能包
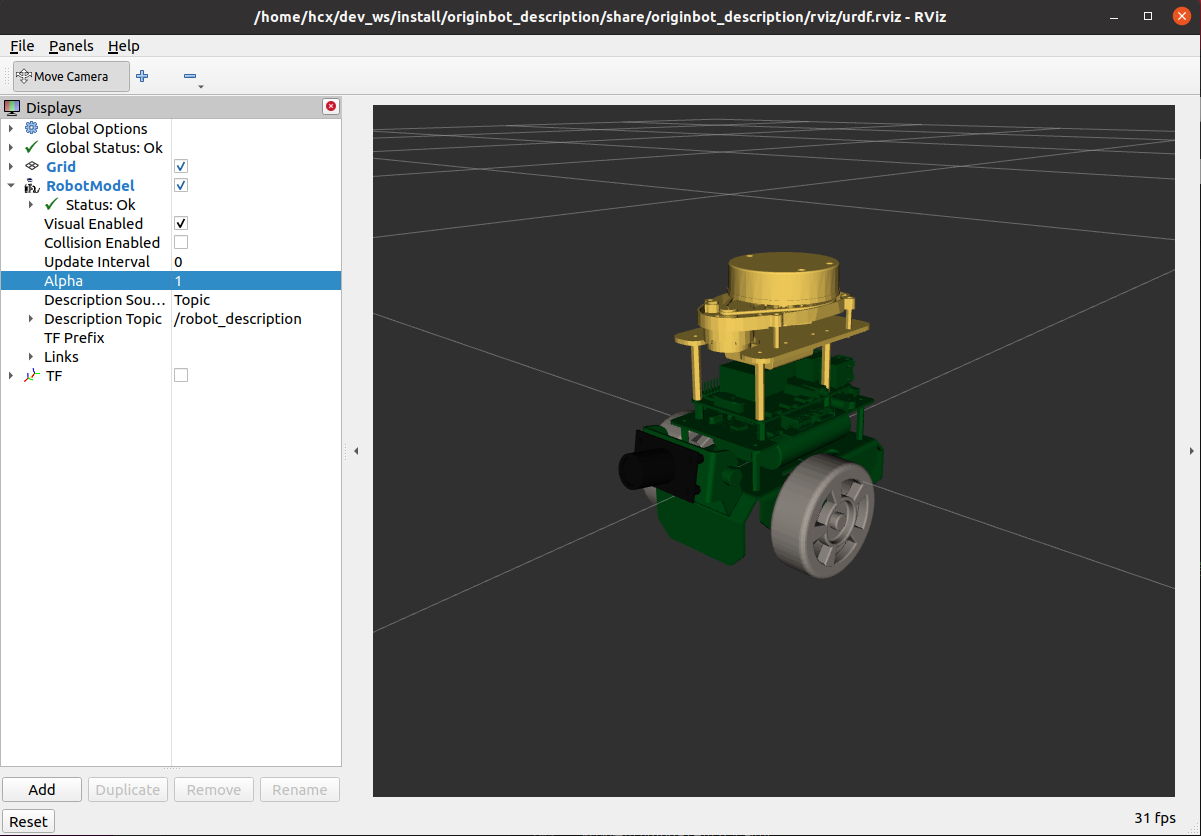
三维模型可视化
在PC端运行如下指令:
即可加载机器人三维模型,并启动Rviz2上位机可视化界面,显示机器人的三维模型:
三维仿真环境
安装依赖
在运行仿真环境之前,现在PC上确认以下功能包是否安装:
$ sudo apt install ros-${ROS_DISTRO}-gazebo-ros
$ sudo apt install ros-${ROS_DISTRO}-gazebo-ros2-control
$ sudo apt install ros-${ROS_DISTRO}-gazebo-plugins
$ sudo apt install ros-${ROS_DISTRO}-ros2-control
$ sudo apt install ros-${ROS_DISTRO}-ros2-controllers
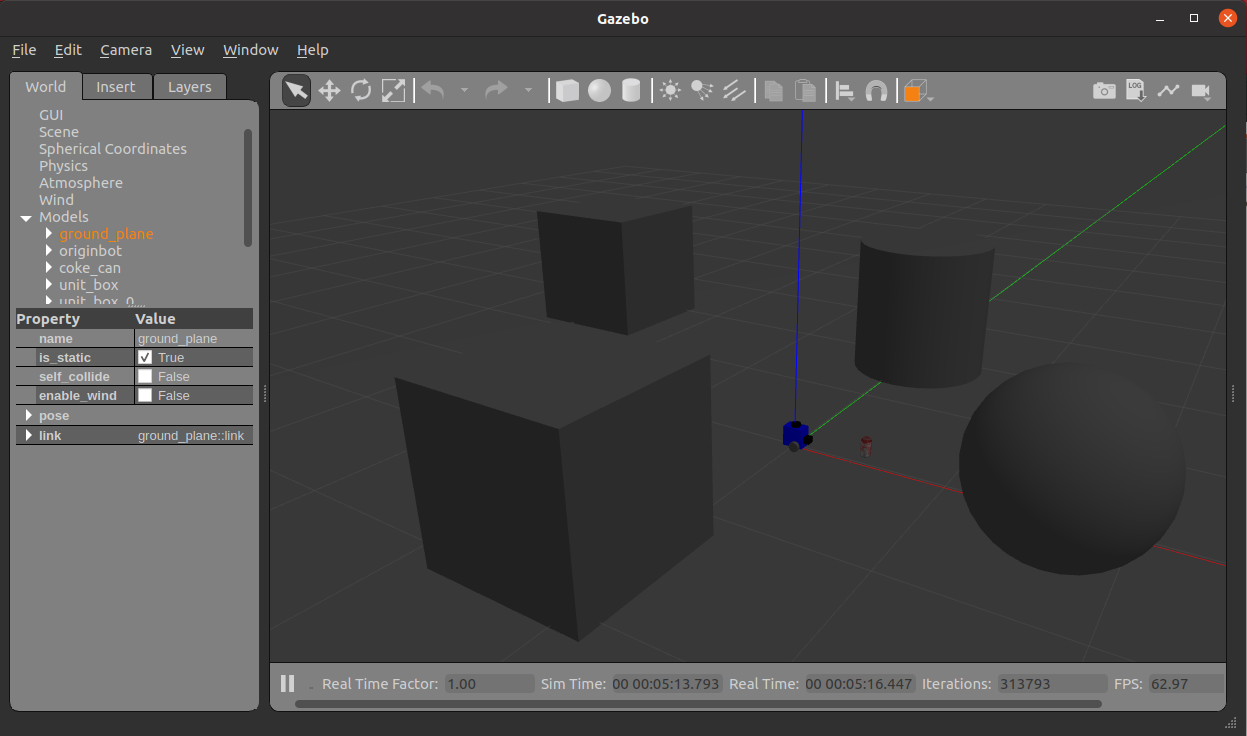
启动仿真
启动终端,运行如下指令,等待Gazebo仿真软件的启动:
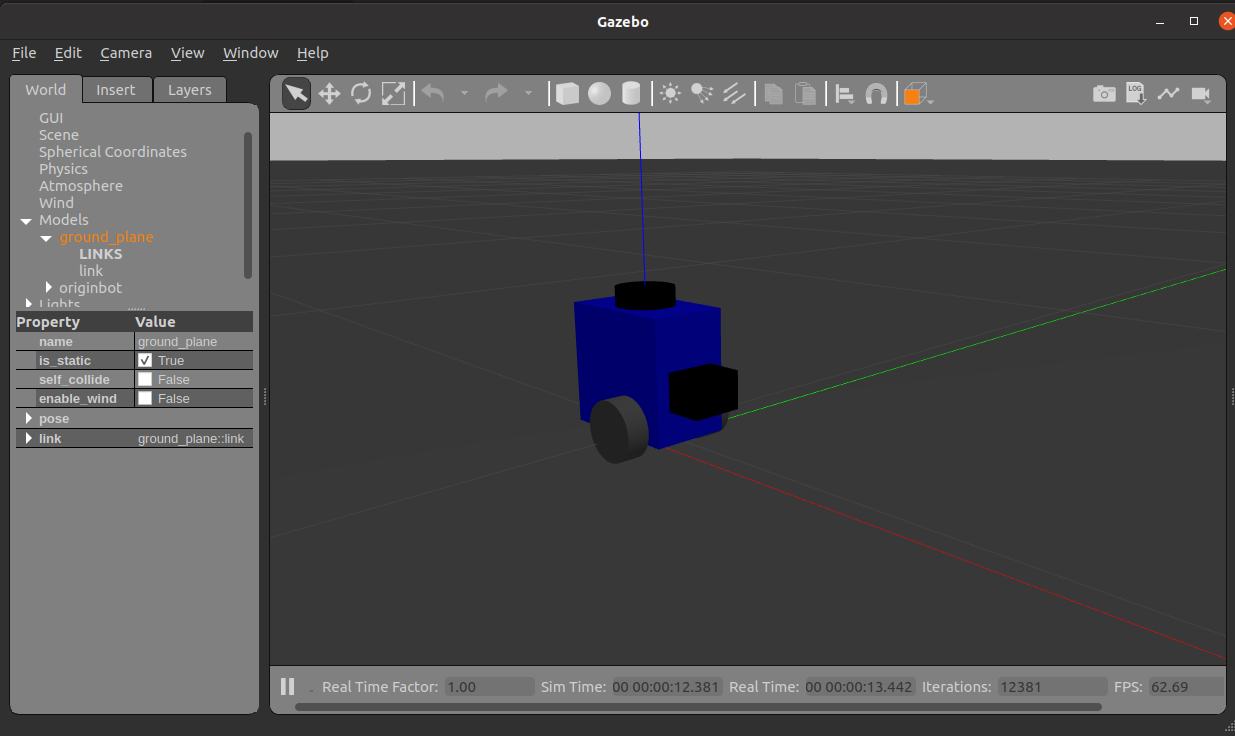
Hint
- 为保证模型顺利加载,请将离线模型文件库下载并放置到~/.gazebo/models下,否则可能会出现Gazebo无法启动的问题。点击下载离线模型
- 如使用虚拟机无法显示机器人模型,还需要将虚拟机设置中的"加速3D图形"关闭,并在Ubuntu系统的.bashrc里加入“export SVGA_VGPU10=0”,使用CPU渲染Gazebo。
查看仿真数据
当前仿真环境中的各项数据是否有成功仿真出来呢,我们可以通过话题列表来确认:
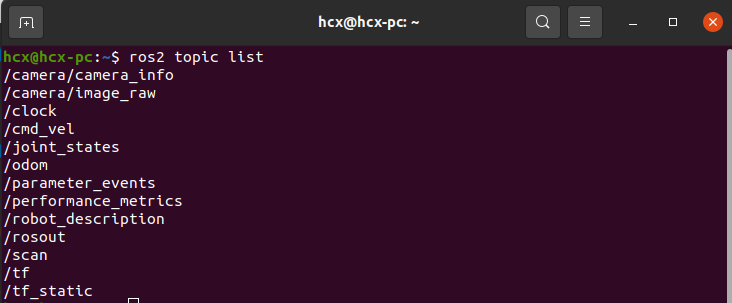
可以看到,在当前仿真环境中,速度控制、里程计、相机图像、雷达数据等都已经被成功仿真了。
控制机器人运动
启动一个新的终端,运行键盘控制节点,即可通过键盘控制仿真环境中的机器人运动:
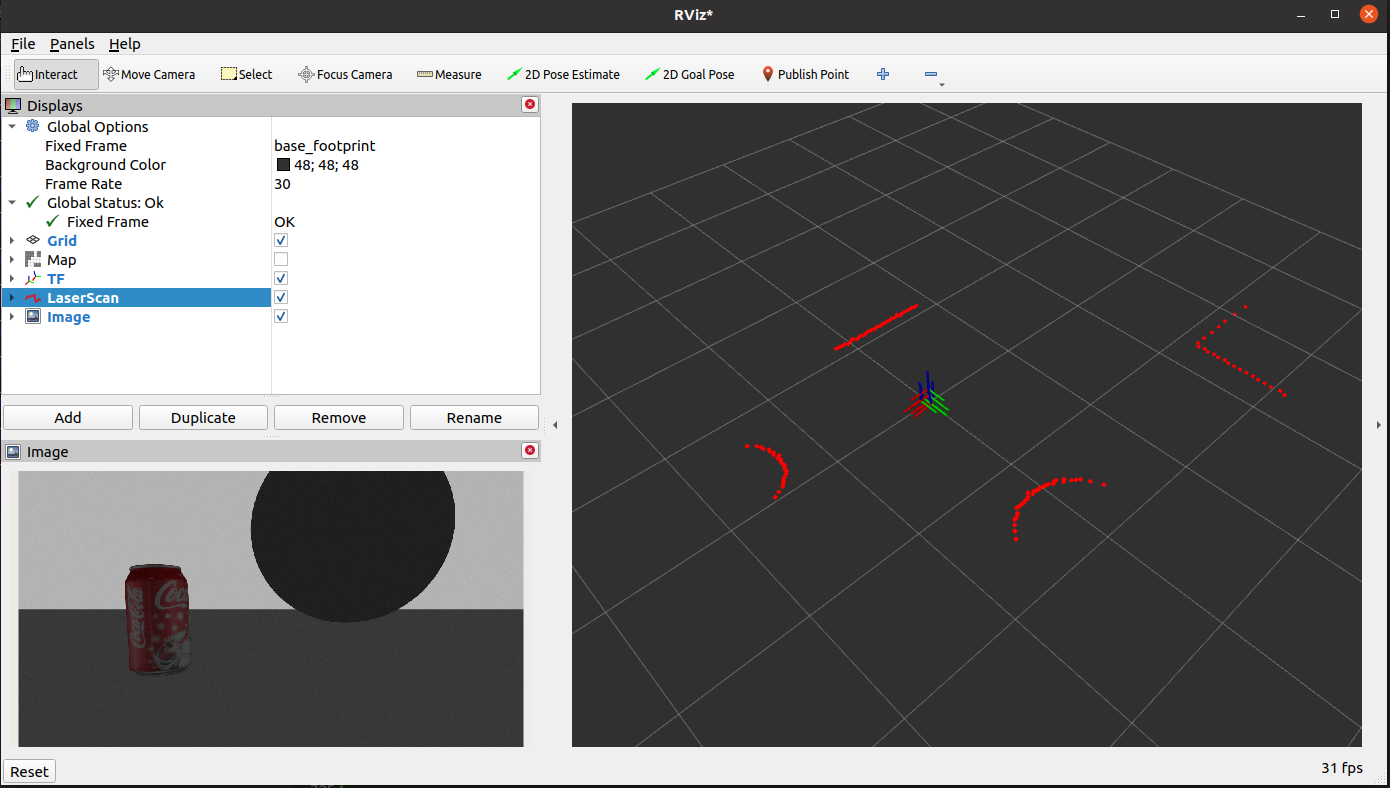
查看传感器可视化数据
先在仿真环境中放入一些障碍物:
然后启动Rviz:
在Rviz中配置Image和LaserScan的显示项,订阅对应的话题,即可看到可视化效果: