地图构建(Gazebo)
Hint
操作环境及软硬件配置如下:
- PC:Ubuntu (≥20.04) + ROS2 (≥Foxy)
启动Gazebo仿真环境
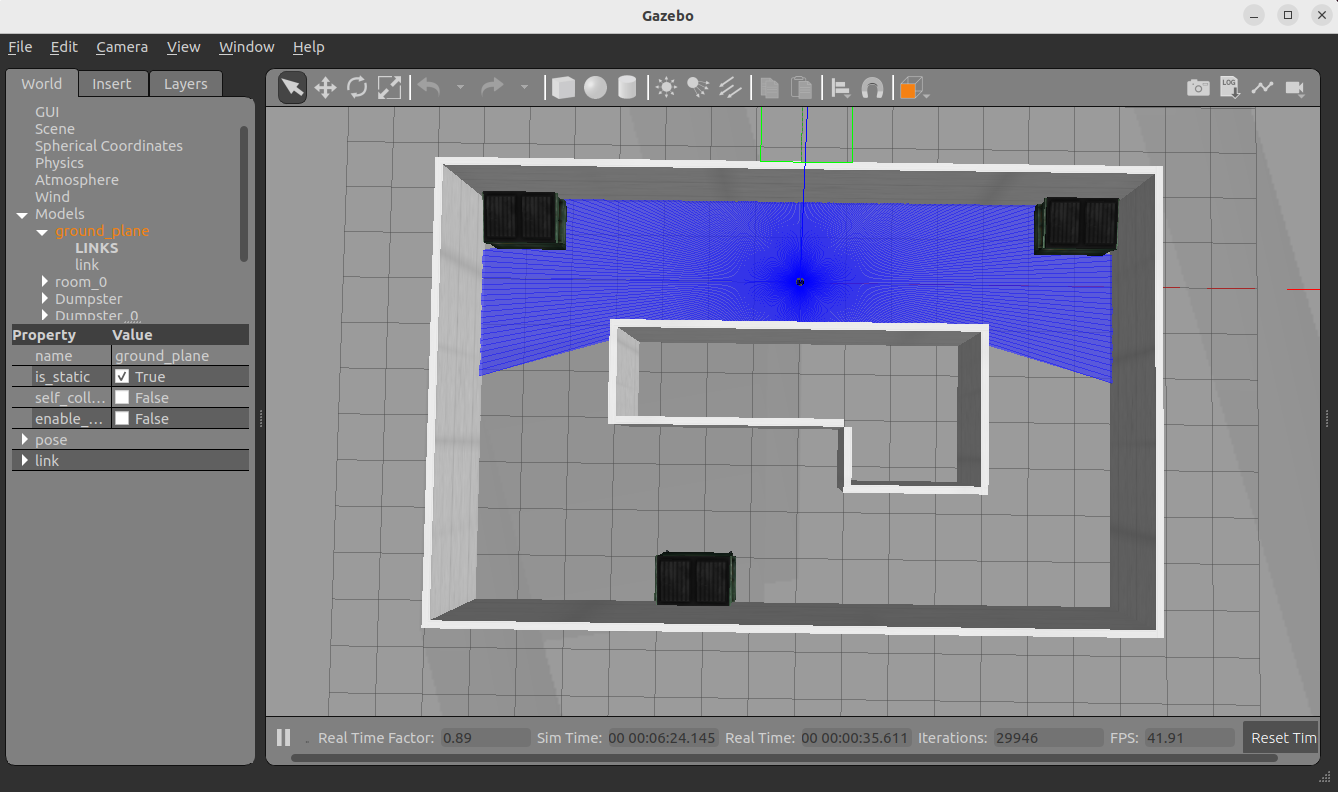
在PC端打开一个新终端,在终端中输入如下指令,启动Gazebo仿真环境:
稍等片刻,启动成功后,即可看到包含机器人模型的仿真环境:
启动SLAM及可视化显示
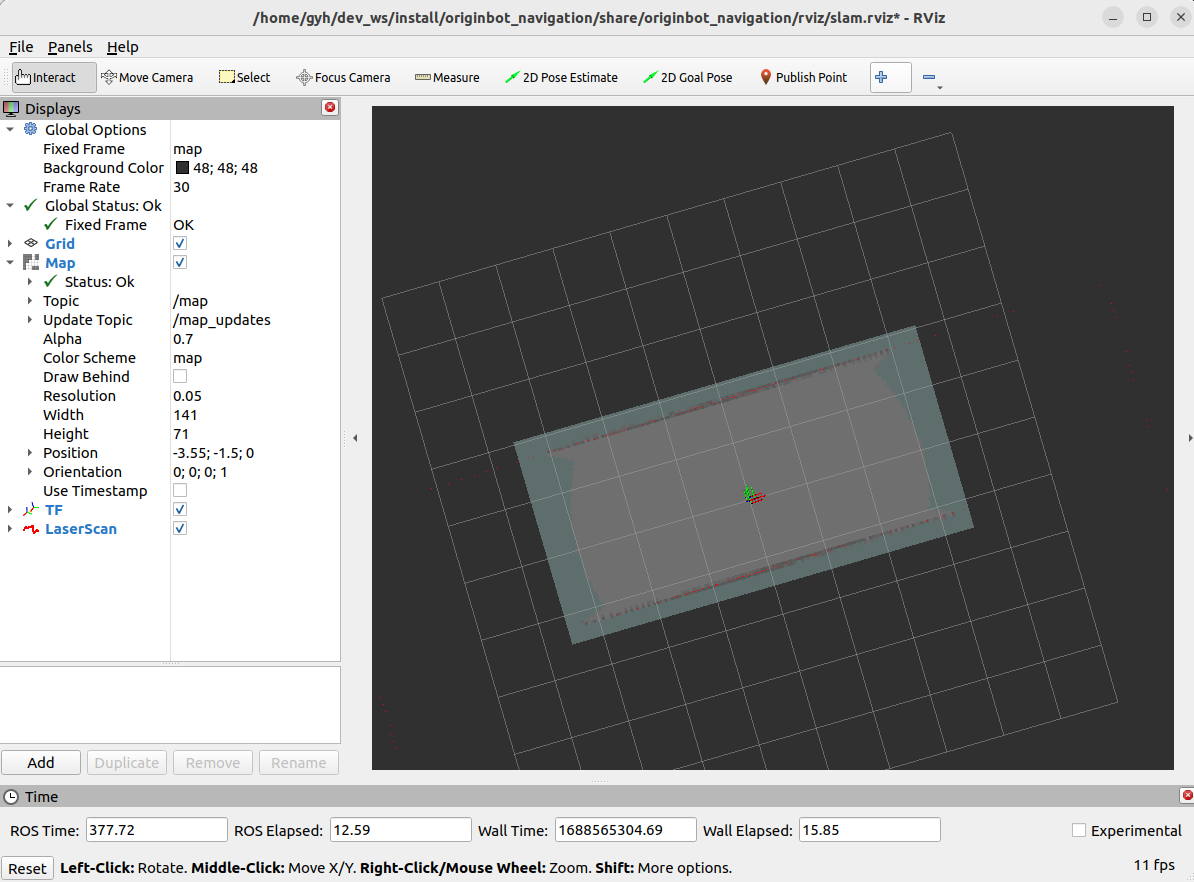
在PC端打开一个新终端,在终端中输入如下指令,启动cartographer建图算法:
Hint
确保在PC端已经完成originbot_desktop代码仓库的下载和编译。如果不方便使用originbot_desktop代码仓库,也可以使用“ros2 run rviz2 rviz2”单独启动Rivz2,手动添加map、tf、laserscan等显示插件,也可以达到类似的效果。
键盘控制建图
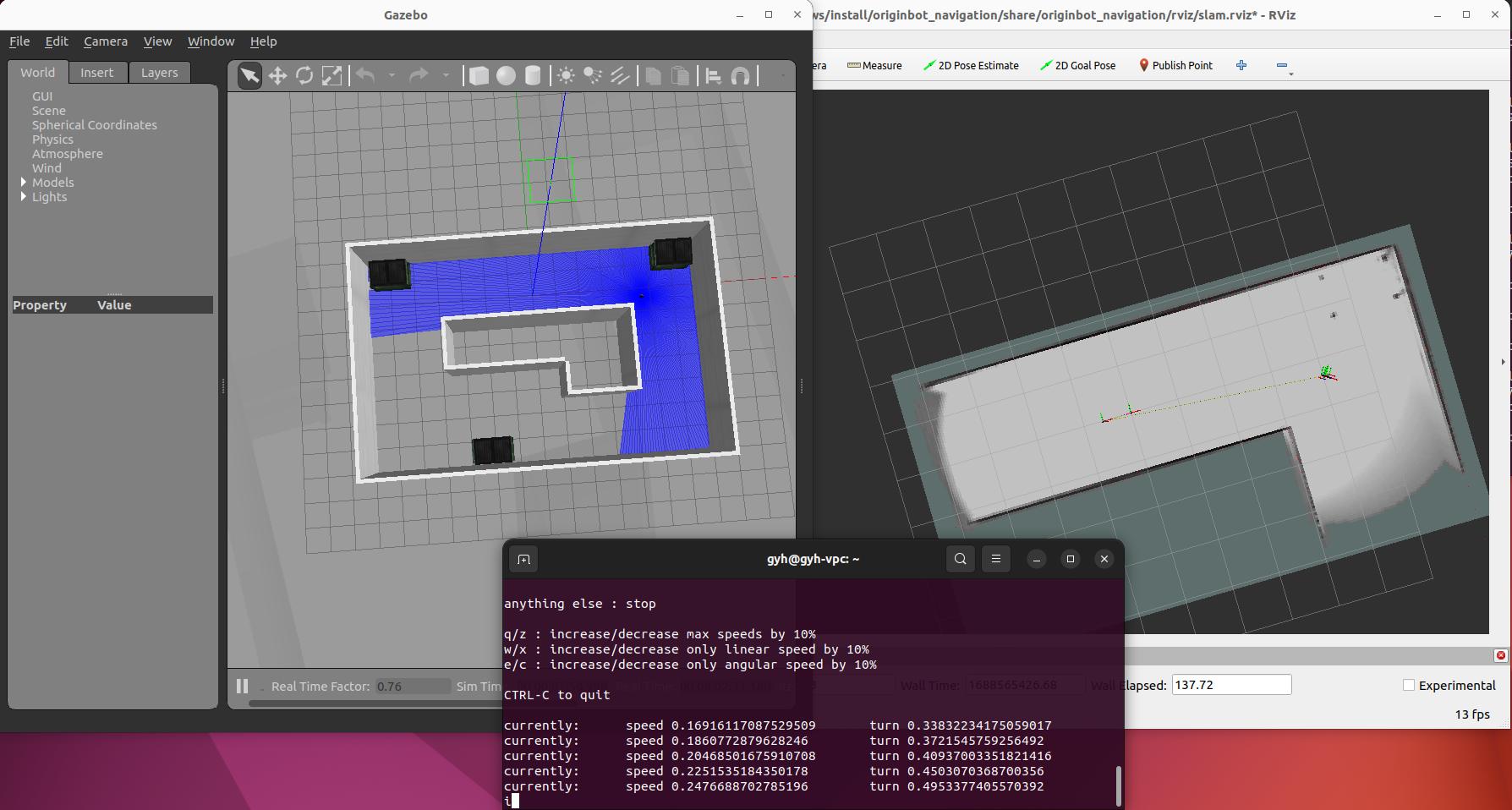
为了让机器人建立周边环境的完整信息,我们还需要启动一个键盘控制节点:
现在,我们就可以在键盘控制的终端中,点击键盘的上下左右键,控制机器人探索未知的环境啦,Rviz中会逐渐出现地图的全貌。
保存地图
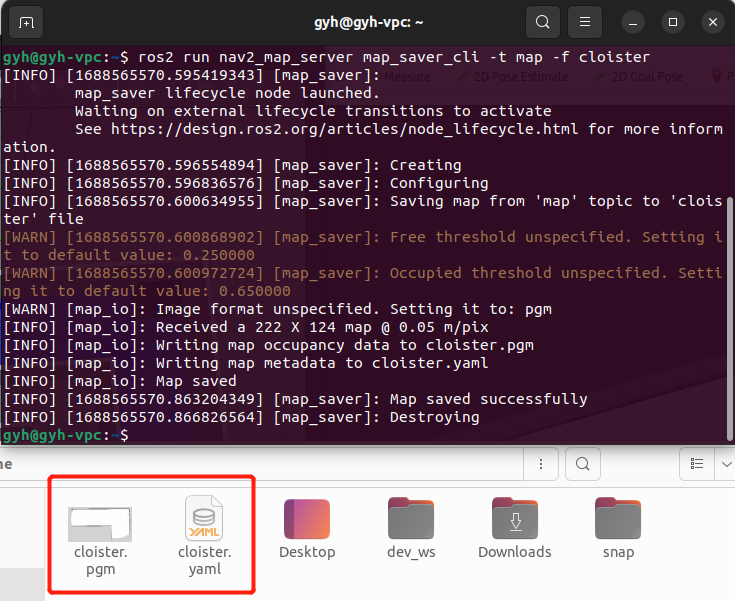
建图完成后,可以使用如下指令来保存地图:
Info
以上指令会将地图保存到终端的当前路径下,在后续导航使用前,需要拷贝到originbot_navigation功能包中。
