电脑端环境配置
Ubuntu系统安装
方法一:虚拟机安装Ubuntu
虚拟机是一个软件,可以在已有系统之上,构建另外一个虚拟的系统,让多个操作环境同时运行。
这里我们采用的虚拟机软件叫做vmware,下载地址如下,安装步骤和其他软件相同,请大家自行下载并安装:
准备工作完成后,就可以开始系统安装啦,安装步骤如下:
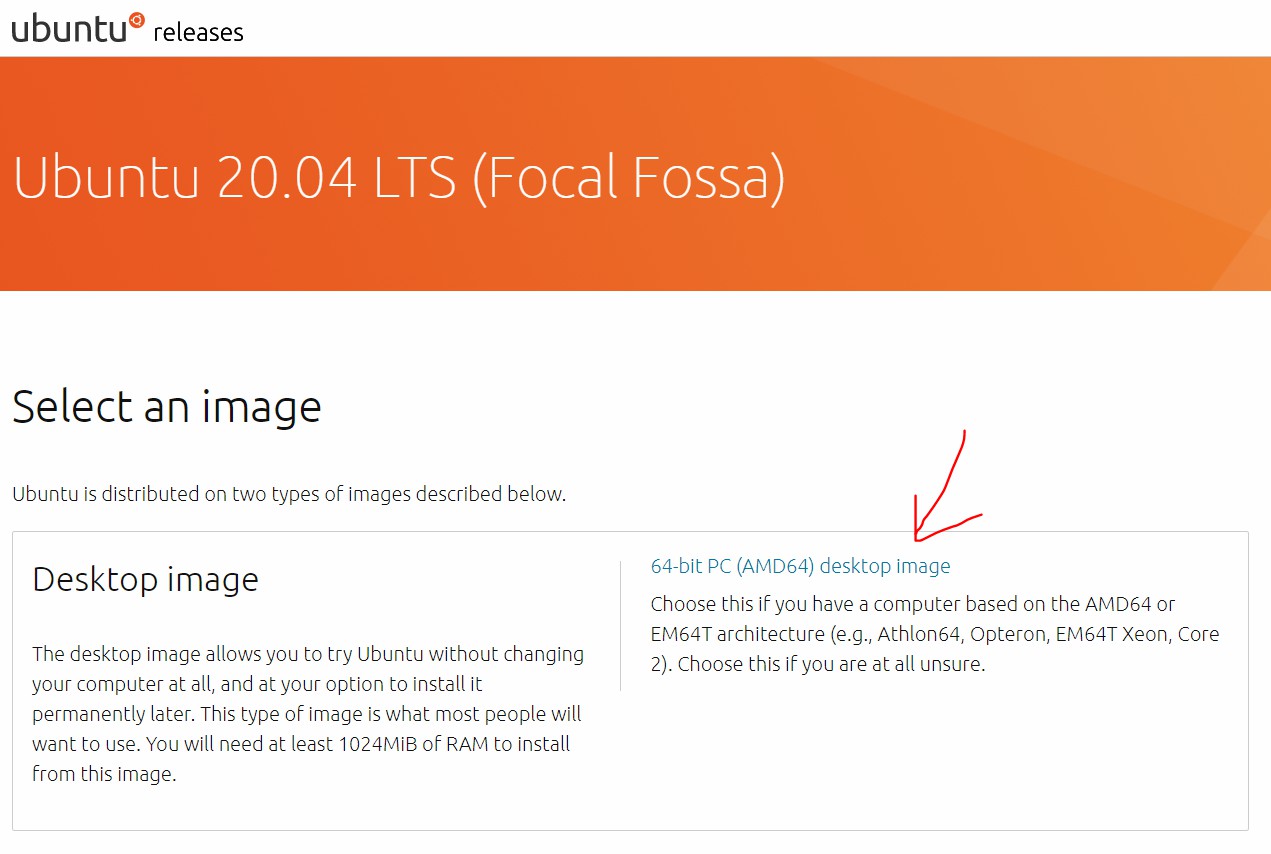
(1) 下载系统镜像
Attention
此处推荐选择Ubuntu20.04或者Ubuntu22.04,版本选择的不同,决定着下一步ROS2版本安装的不同,Ubuntu20.04推荐安装ROS2 Foxy,Ubuntu22.04推荐安装 ROS2 Humble。
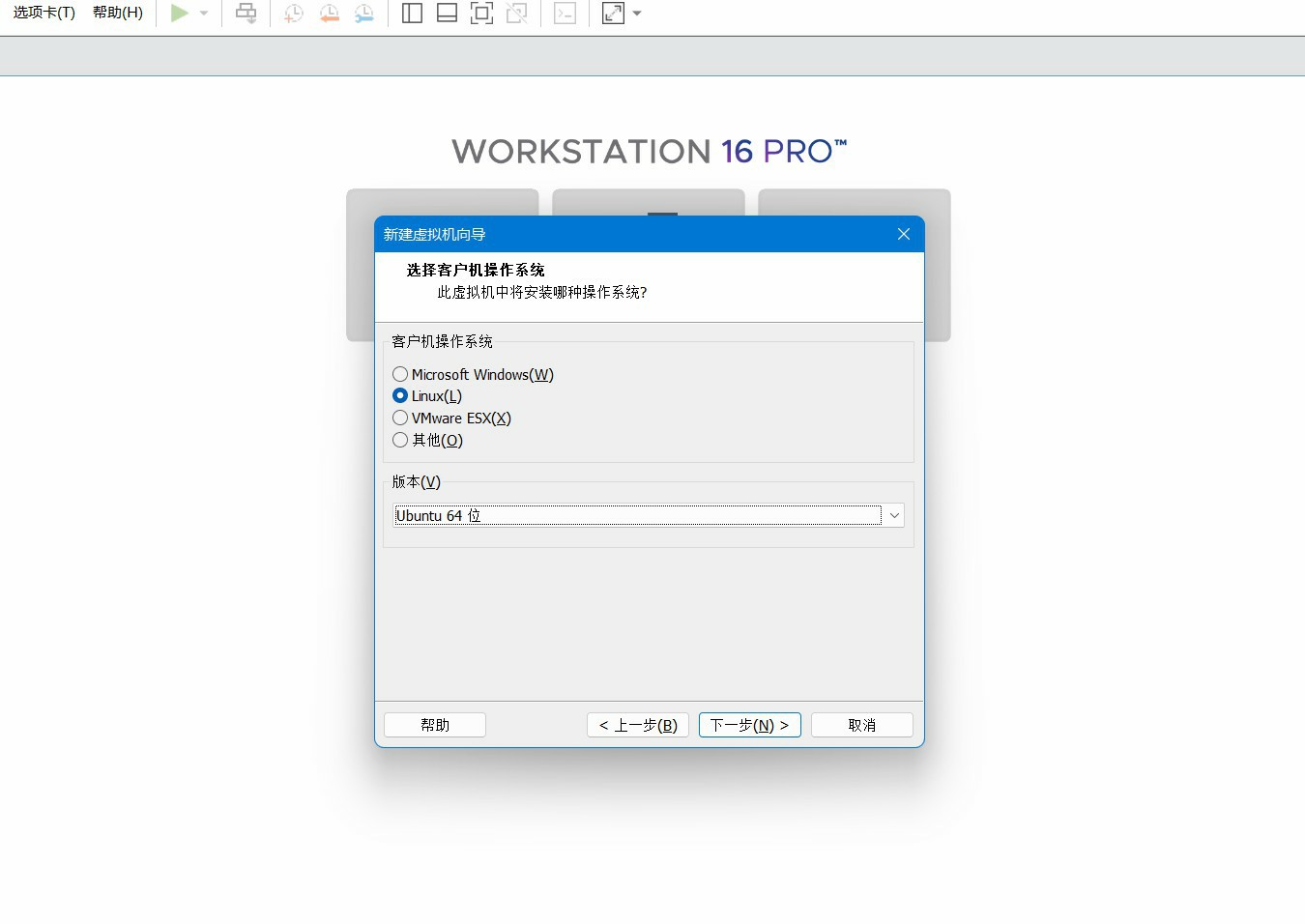
(2) 在虚拟机中创建系统
(3) 设置虚拟机硬盘大小
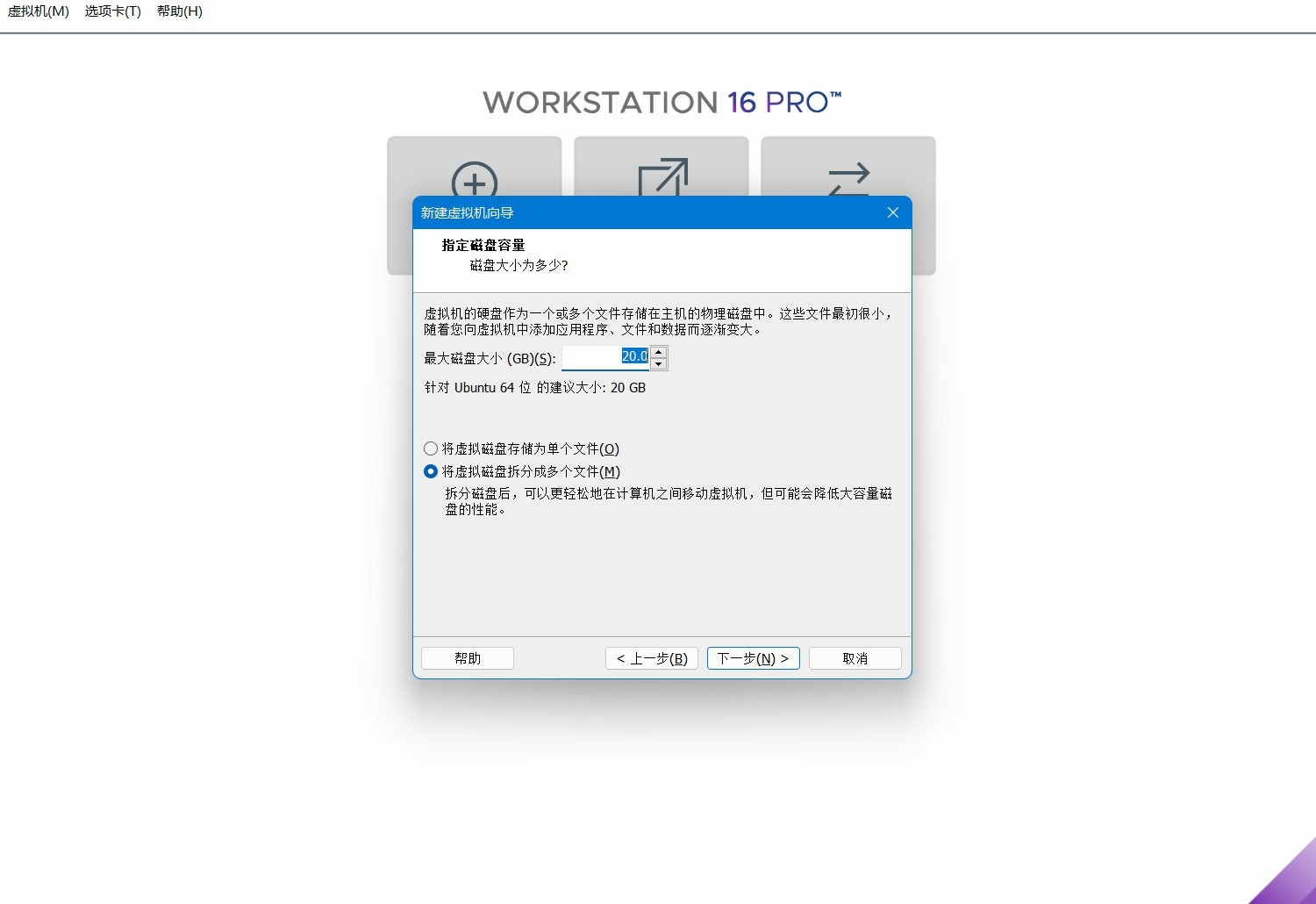
Attention
这里硬盘大小可以稍微大一些,建议不小于60G,避免后续出现磁盘空间不足的情况。
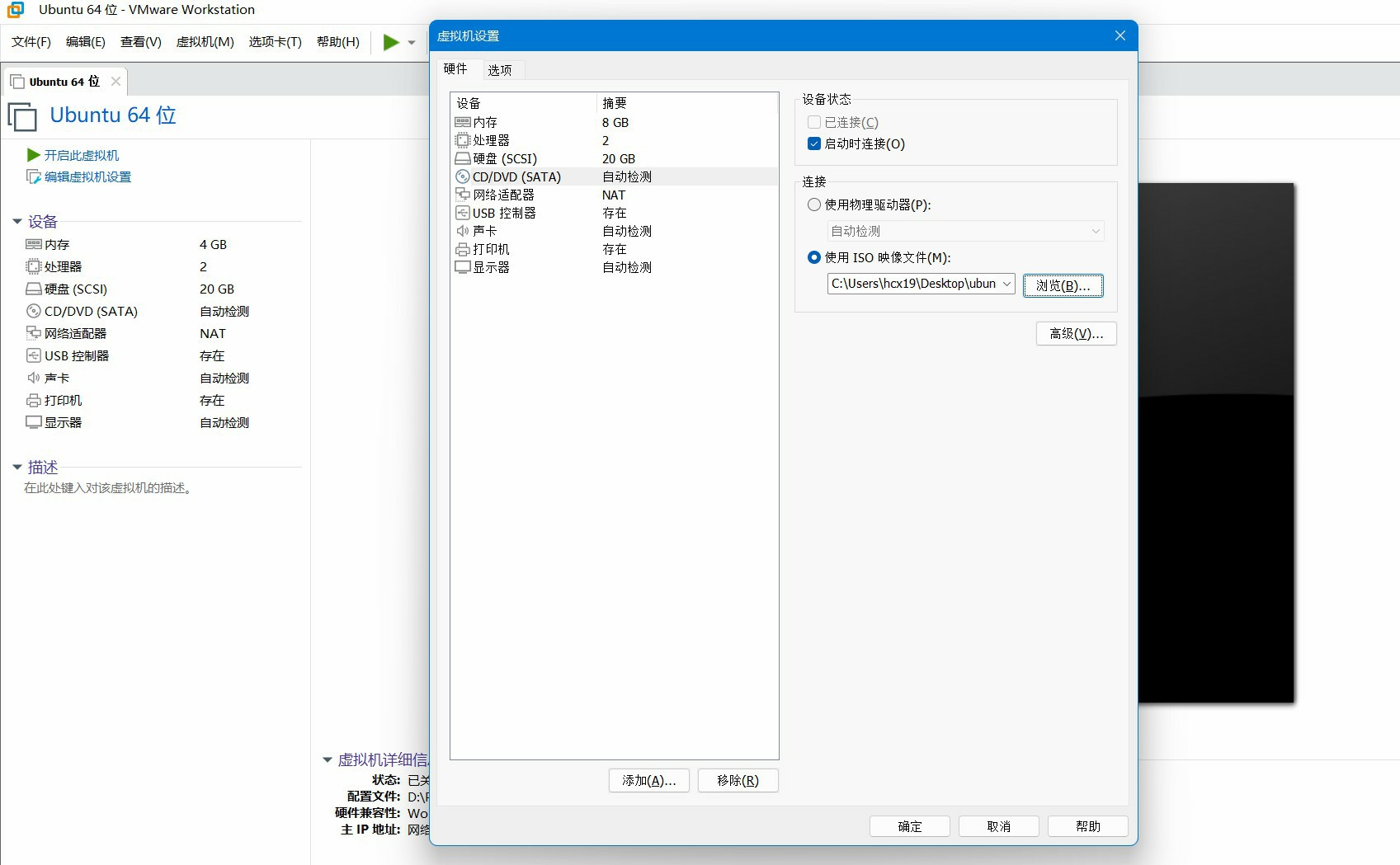
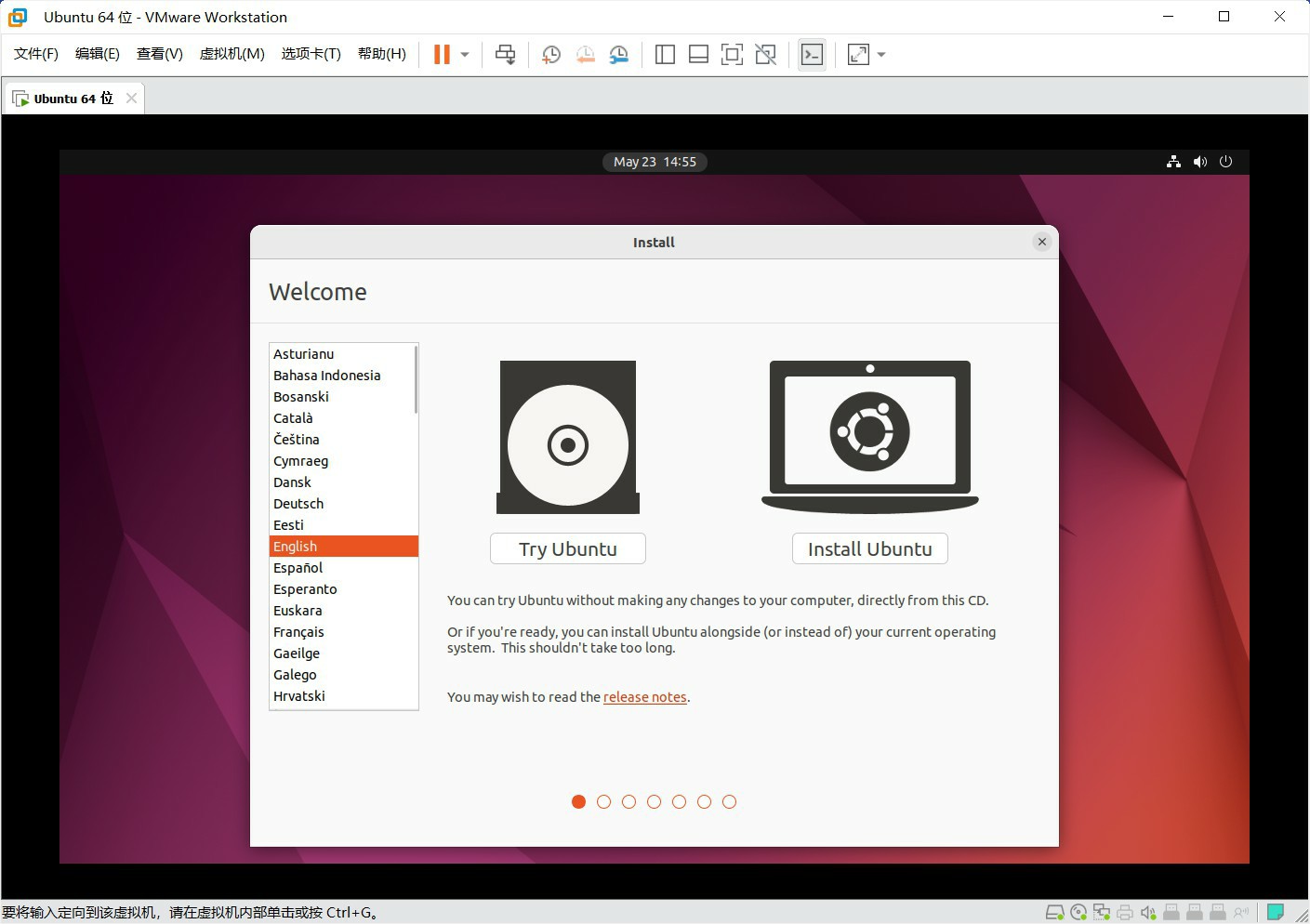
(4) 设置Ubuntu镜像路径
(5) 启动虚拟机
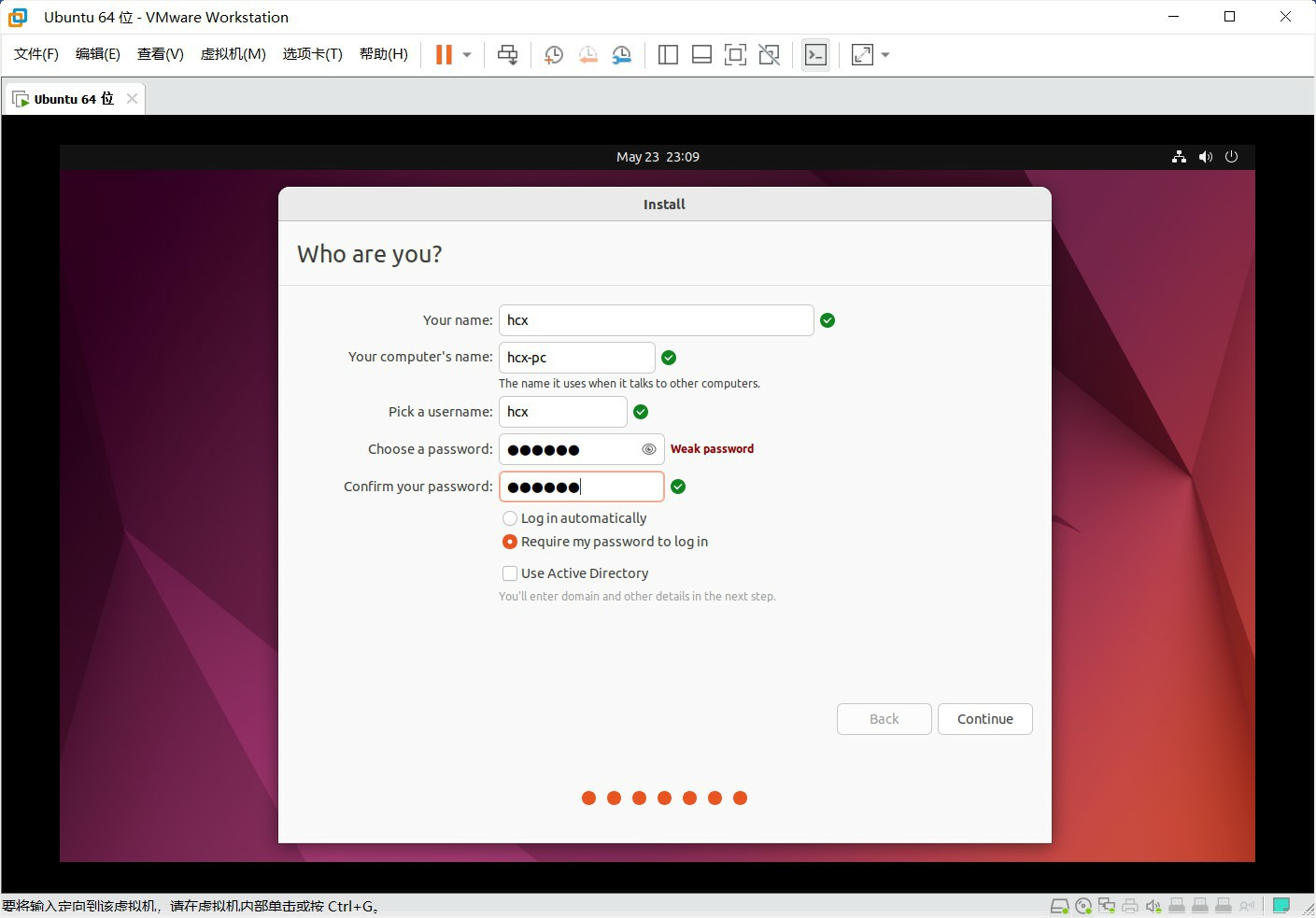
(6) 设置用户名和密码
(7) 等待系统安装
(8) 完成安装
虚拟机中的Ubuntu系统安装好后,大家可以先随意使用熟悉一下。
方法二:Ubuntu双系统安装
Attention
双系统安装有一定风险,可能会导致电脑无法启动,推荐有经验的开发者操作。以下安装步骤使用的电脑配置如下,也可以参考网上的资料操作:
-
笔记本型号:小米15.6 Pro
-
电脑配置:两块硬盘,一个装Windows,另外一个装了两个Ubuntu系统,启动项设置在Ubuntu硬盘上,这样会比较稳定,不会因为鼓捣Ubuntu导致windows崩溃。
(1) 下载系统镜像
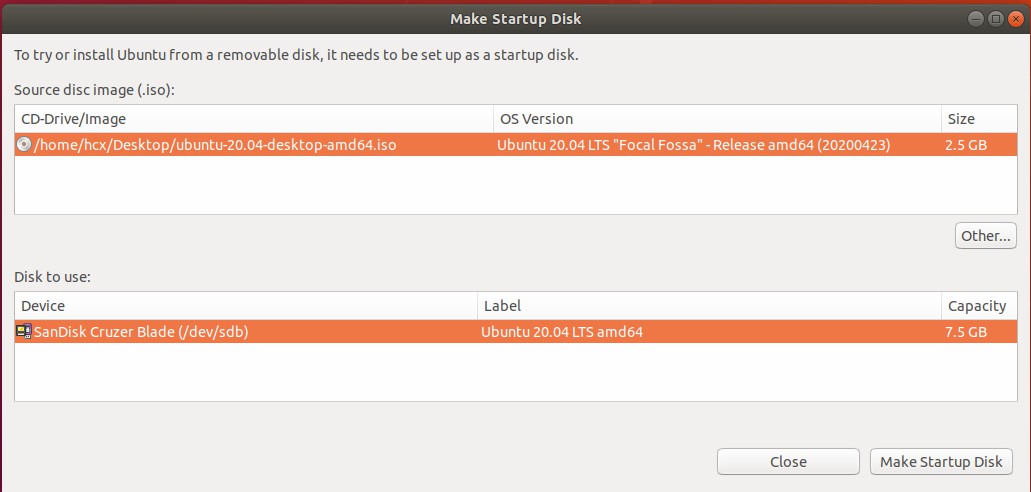
(2) 制作USB安装镜像
接下来将一个U盘制作成启动盘,只要大于4G的都可以。
可以使用Ubuntu自带的工具,或者UltraISO等启动盘制作工具,启动软件后,选择ISO镜像路径和U盘位置,点击开始后,大概10分钟制作完成。
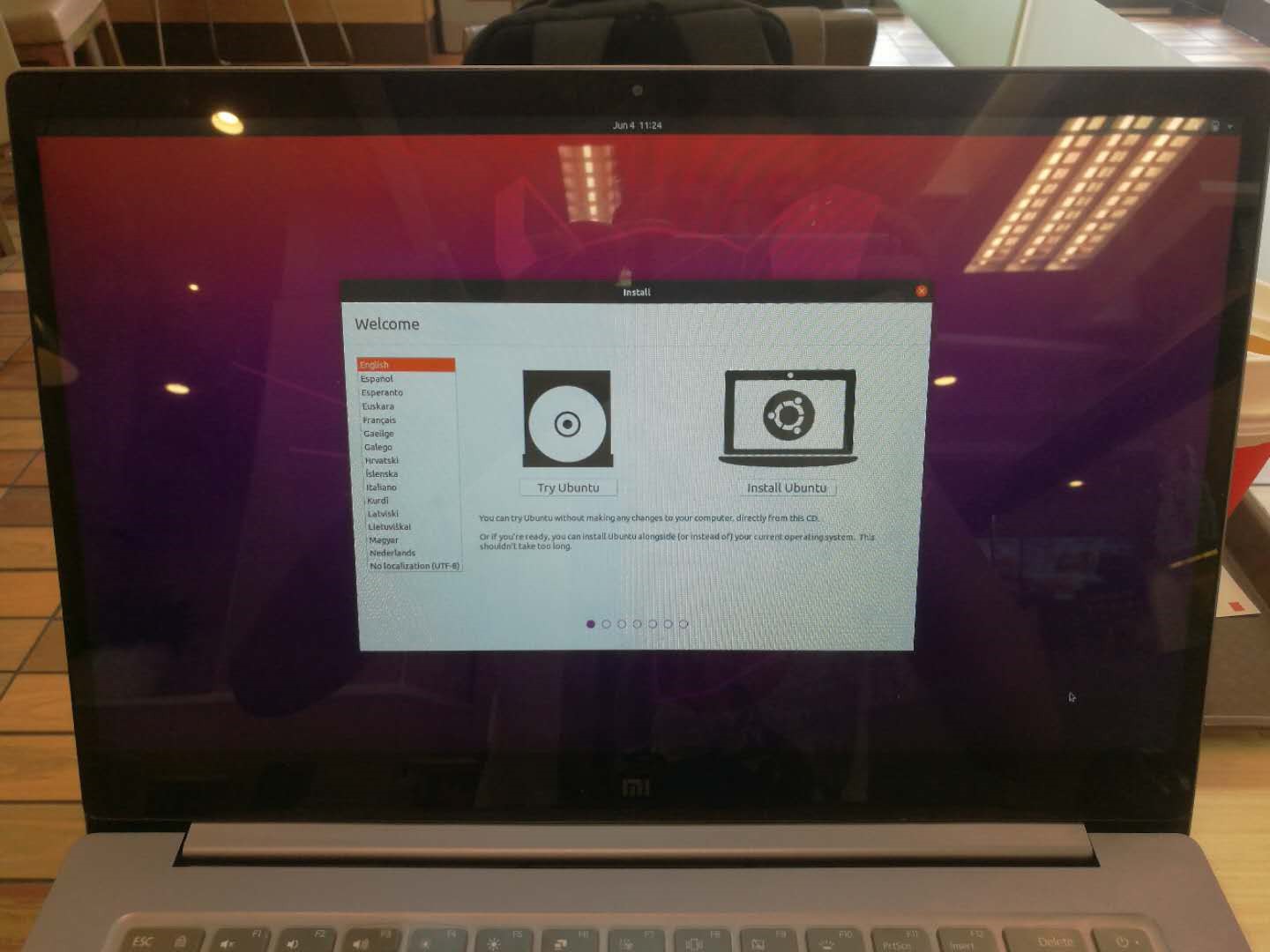
(3) 硬盘安装
硬盘安装是关键步骤,一定要选择好分区和启动项的位置,不然可能装完之后电脑会变砖。
插入制作好的启动U盘后,开机从U盘启动,本电脑按F12,很快就会进入启动盘,前边的几个步骤按照说明操作即可。
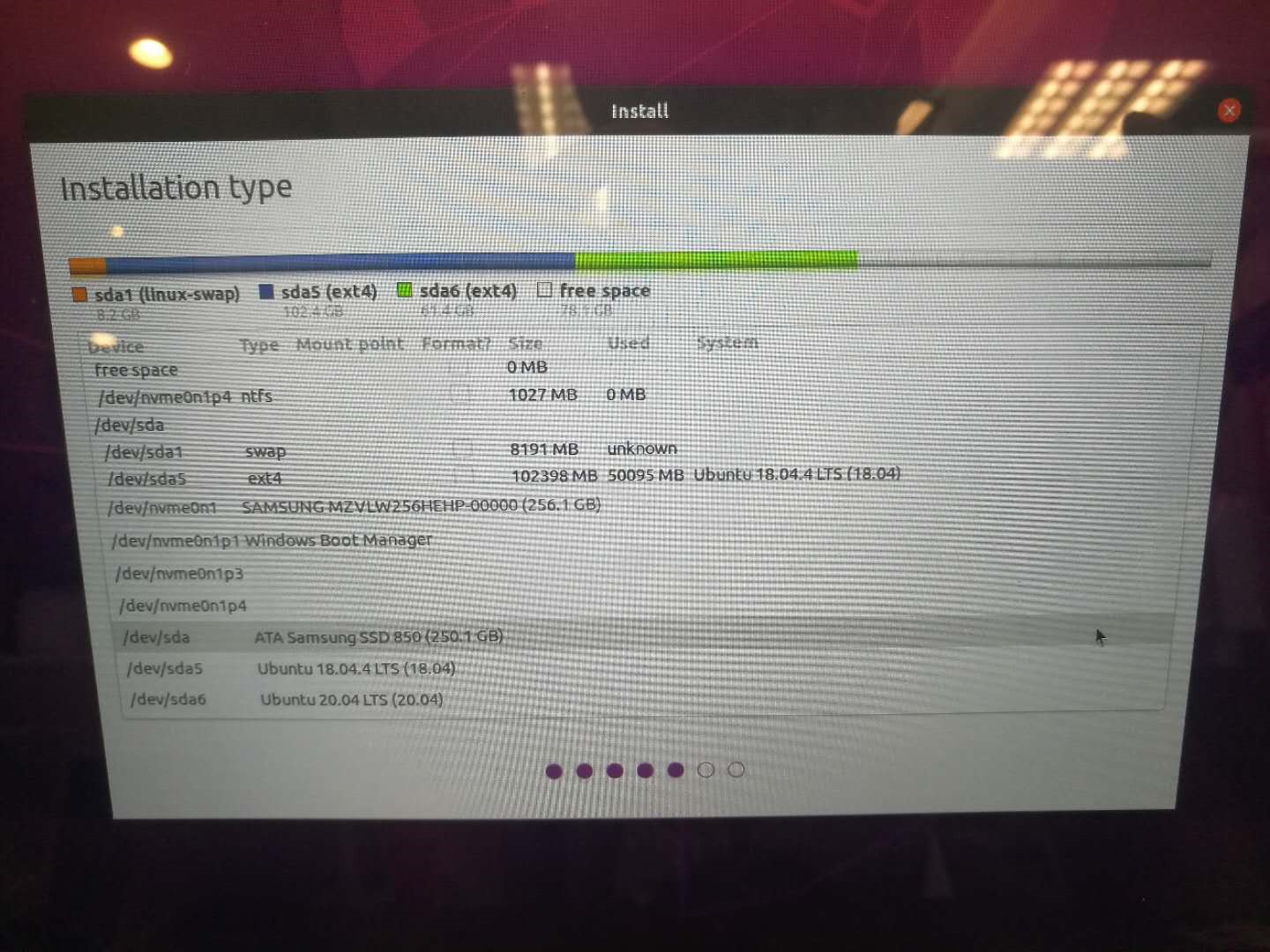
关键的设置在分区这一步,因为电脑有多个系统,不能自动安装,有可能会覆盖原本系统的启动项,选择“something else”,自己设置分区。
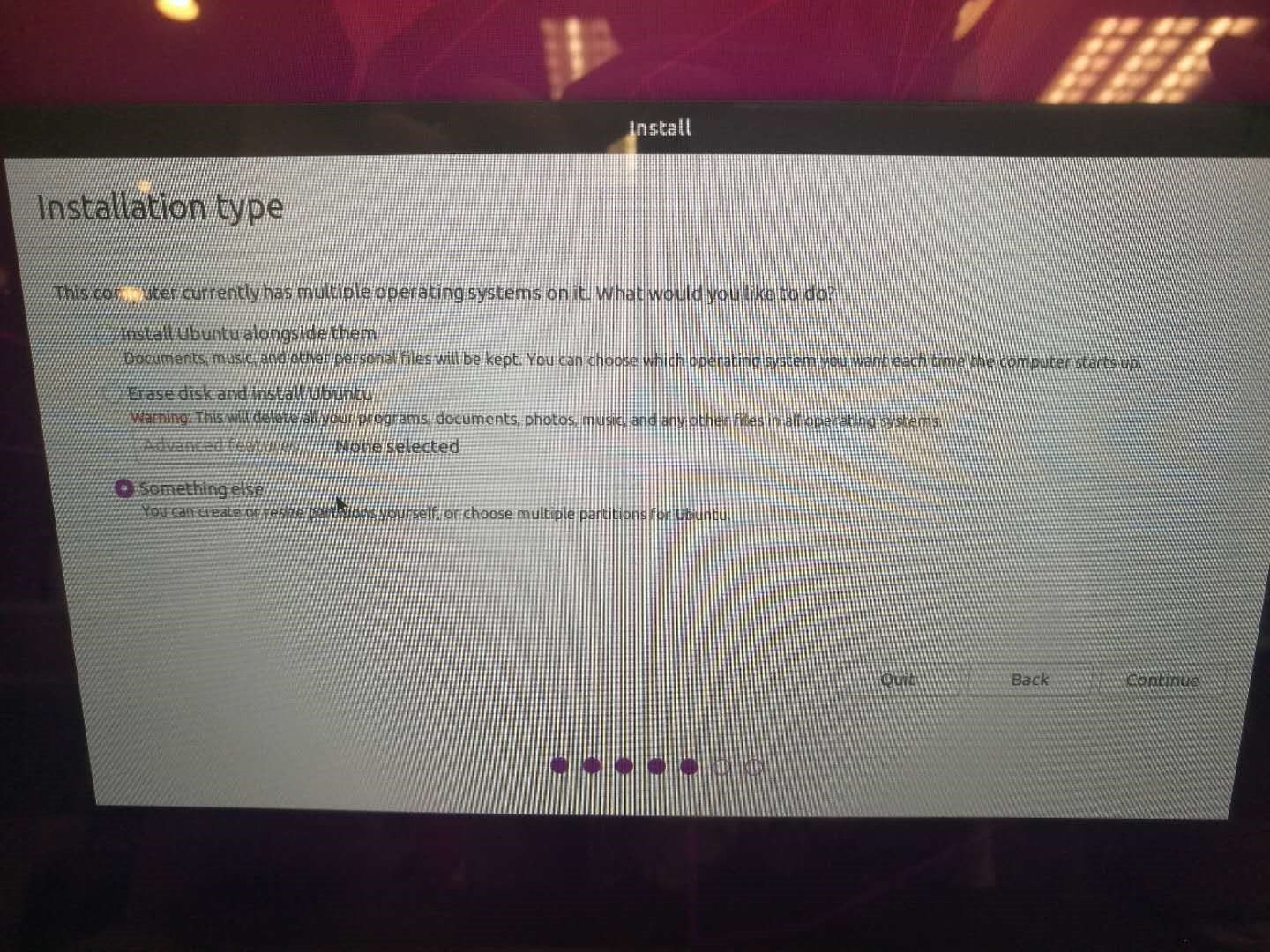
这里我们只划分成“\”、“swap”两个分区,这样所有文件共用一个空间大小,非常灵活。
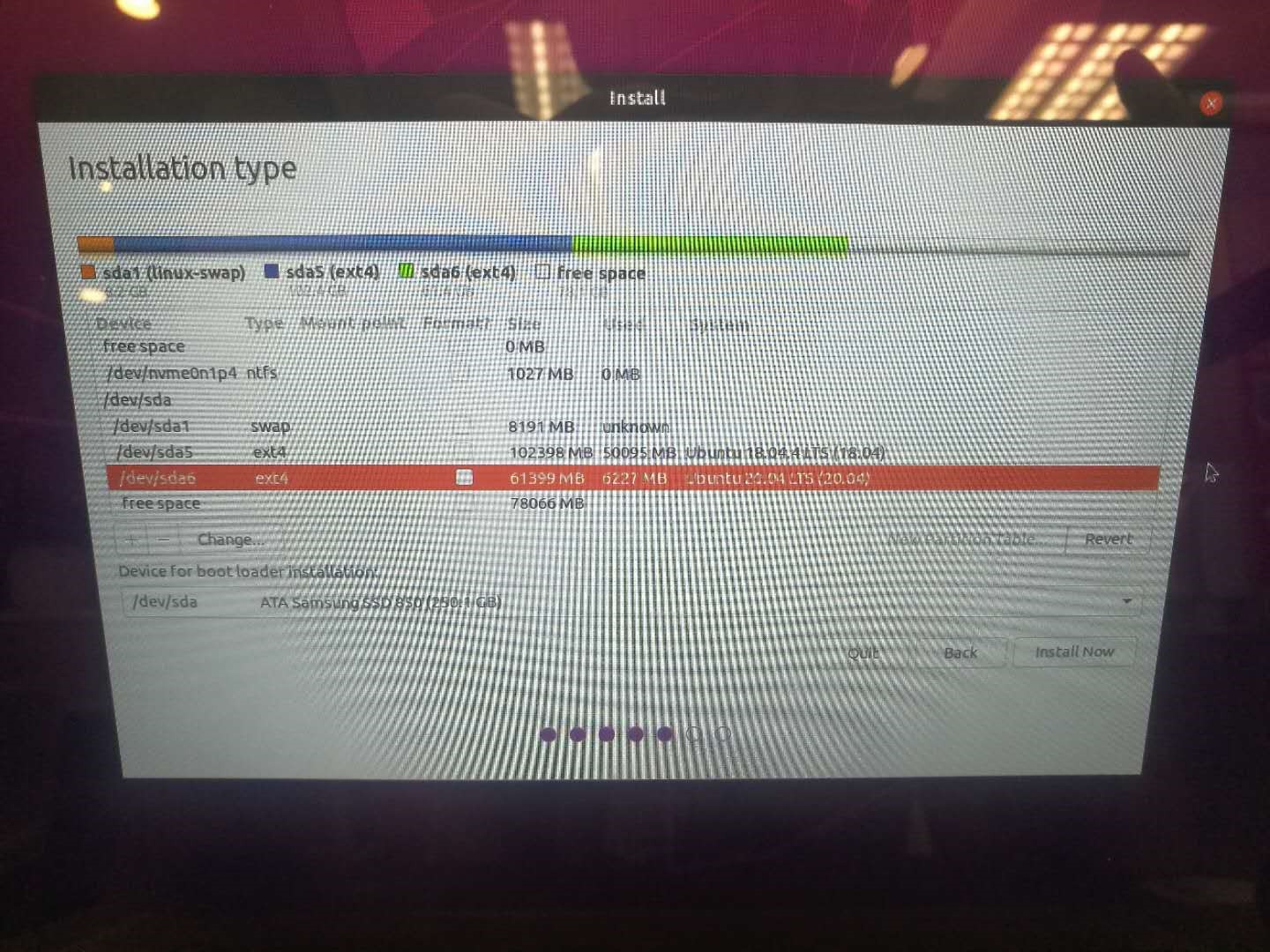
分区设置好之后,还须要注意设置bootlodaer的位置,这里选择的是ubuntu所在的硬盘,避免和windows冲突。
设置完成后就可以安装啦,10分钟所有就安装完成。
(4) 启动新系统
重启电脑,顺利看到grub界面。
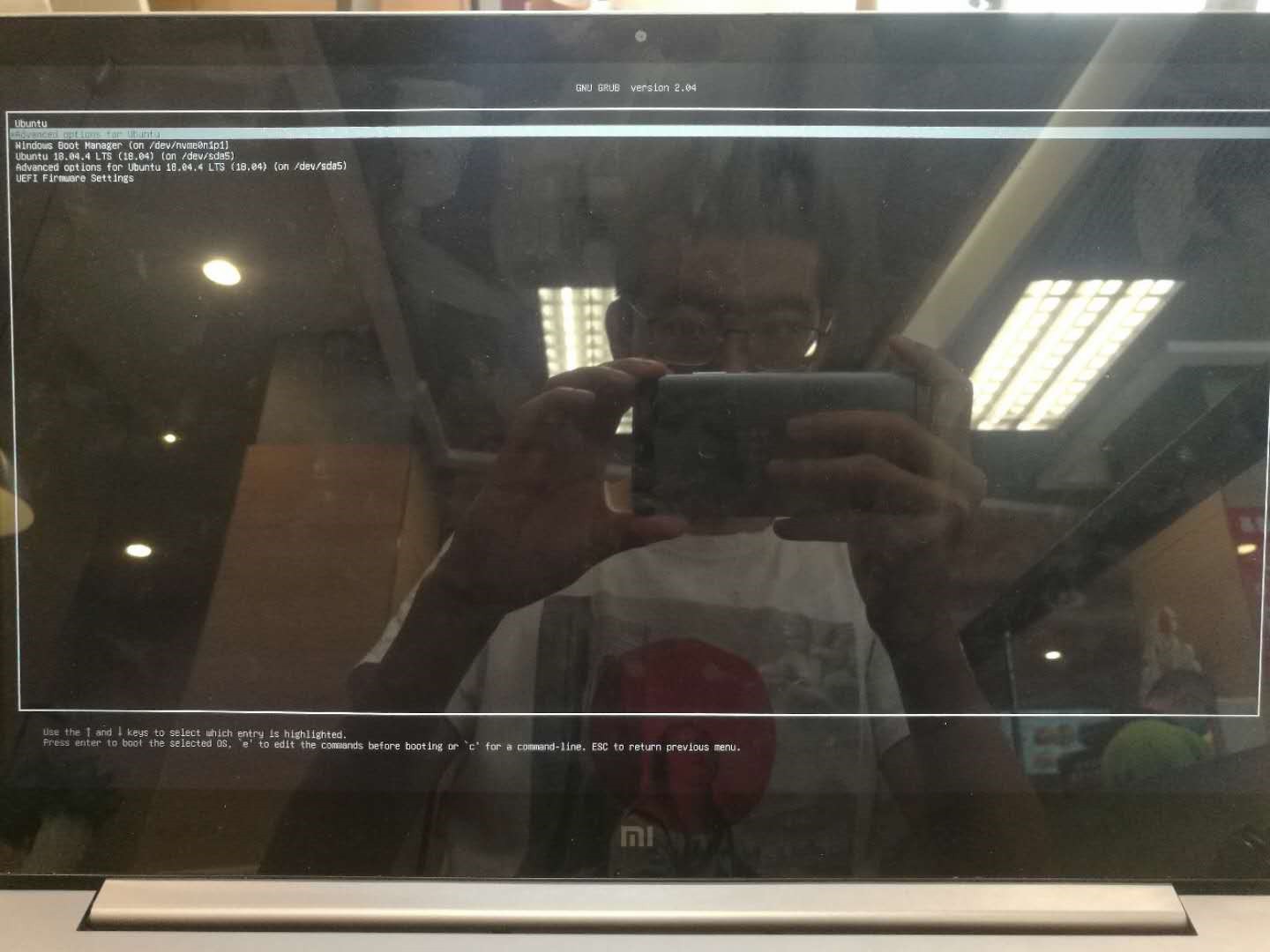
选择Ubuntu,第一次启动稍微有点慢。
至此,Ubuntu双系统安装完成。
ROS2系统安装
接下来,我们就可以把ROS2安装到Ubuntu系统中了。安装步骤如下:
(1) 设置编码
$ sudo apt update && sudo apt install locales
$ sudo locale-gen en_US en_US.UTF-8
$ sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
$ export LANG=en_US.UTF-8
(2) 添加源
$ sudo apt update && sudo apt install curl gnupg lsb-release
$ sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
$ echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
Hint
大部分国内开发者在这都会遇到同一个问题:网址无法连接。解决方案可以参考古月居官网上的这篇帖子:《解决”Failed to connect to raw.githubusercontent.com“报错》
(3) 安装ROS2
Attention
此处以Ubuntu22.04下安装ROS2 Humble为例,如使用Ubuntu 20.04,请将“humble”改为“foxy。
(4) 设置环境变量
(5) ROS2示例测试
为了验证ROS2安装成功,我们可以通过以下示例进行测试。
命令行操作
先来试试ROS2最为重要的底层通信系统DDS是否正常吧。
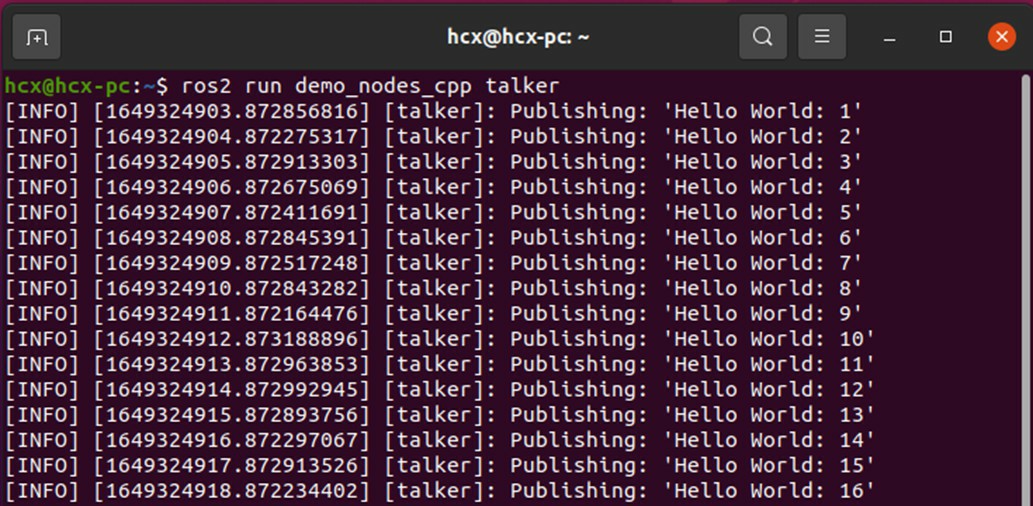
启动第一个终端,通过以下命令启动一个数据的发布者节点:
启动第二个终端,通过以下命令启动一个数据的订阅者节点:
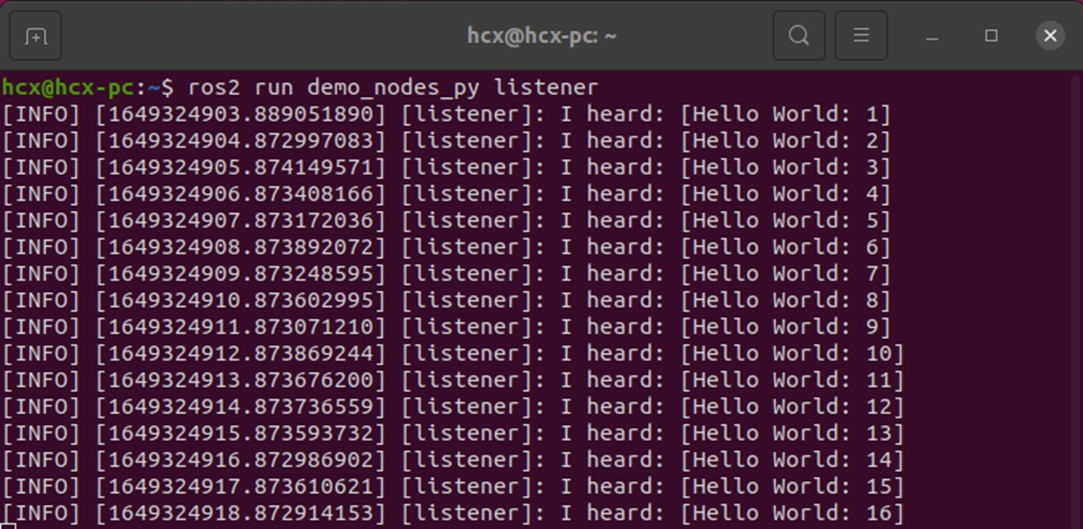
如果“Hello World”字符串在两个终端中正常传输,说明通信系统没有问题。
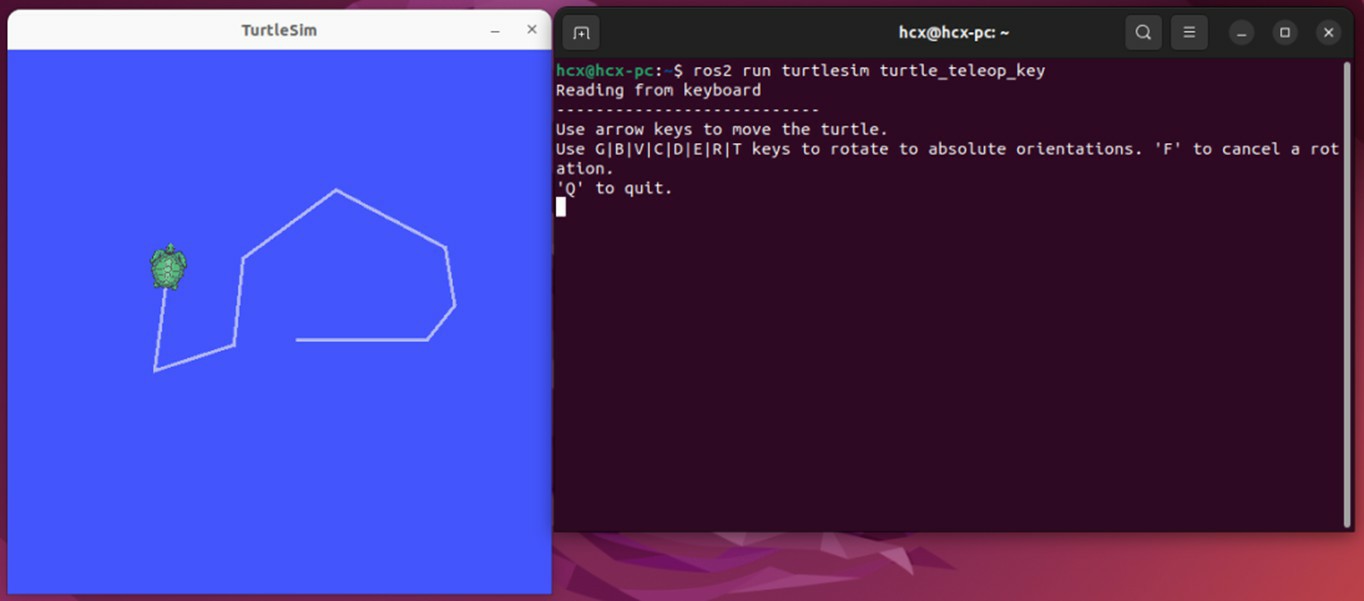
小海龟仿真
再来试一试ROS中的经典示例——小海龟仿真器。
启动两个终端,分别运行如下指令:
第一句指令将启动一个蓝色背景的海龟仿真器,第二句指令将启动一个键盘控制节点,在该终端中点击键盘上的“上下左右”按键,就可以控制小海龟运动啦。
关于小海龟中蕴藏的ROS奥义,我们在后续教程中将持续探索。
至此,ROS2安装成功。
下载/编译PC端功能包
OriginBot使用与开发过程主要在PC端完成,完成以上Ubuntu和ROS2的环境配置后,还需要将OriginBot的PC端功能包下载到电脑上,并且完成编译,便于后续操作使用。
(1) 创建PC端工作空间
使用如下命令,在电脑端创建工作空间:
(2) 下载originbot_desktop和依赖包
OriginBot电脑端的功能包都放置在originbot_desktop代码仓库中:
(3) 安装功能包和依赖
为满足后续机器人开发的使用,还需要安装一系列功能包与依赖库:
$ sudo apt install python3-colcon-ros
$ sudo apt install python3-colcon-common-extensions # ROS2编译器
$ sudo apt install git # 安装git工具
$ sudo apt install ros-${ROS_DISTRO}-nav2* # 安装导航功能包
$ sudo apt install ros-${ROS_DISTRO}-xacro # 安装模型解析功能包
$ sudo apt install ros-${ROS_DISTRO}-teleop-twist-keyboard # 安装键盘控制节点
$ sudo apt install ros-${ROS_DISTRO}-rmw-cyclonedds-cpp # 安装Cyclone DDS
$ sudo apt install ros-${ROS_DISTRO}-cv-bridge # 安装图像处理包
$ sudo apt install ros-${ROS_DISTRO}-robot-state-publisher # 安装机器人状态发布者包
$ sudo apt install ros-${ROS_DISTRO}-joint-state-publisher # 安装关节状态发布者包
$ sudo apt install ros-${ROS_DISTRO}-joint-state-publisher-gui # 安装关节状态发布者包
$ sudo apt install ros-${ROS_DISTRO}-image-transport # 安装图像压缩包
$ sudo apt install ros-${ROS_DISTRO}-image-transport-plugins # 安装图像压缩包
(4) 编译工作空间
回到工作空间的根目录下,编译整个工作空间:
(5) 设置环境变量
为方便后续使用,我们需要配置环境变量,让系统知道工作空间的位置:
在脚本最后边加上:
至此,OriginBot电脑端的功能包配置完毕。
