自主导航
Hint
操作环境及软硬件配置如下:
- OriginBot机器人(导航版)
- PC:Ubuntu (≥20.04) + ROS2 (≥Foxy)
配置地图
自主导航会在之前SLAM建立好的地图之上完成,OriginBot导航功能包中包含一张默认地图,在进行导航前,需要修改成自己环境的地图,修改方法如下:
- 拷贝自己SLAM建立好的地图文件(*.pgm)和地图配置文件(*.yaml),放置到originbot_navigation/maps路径下;
- 修改originbot_navigation/launch/nav_bringup.launch文件中调用的地图名称,确保和上一步拷贝的地图配置文件名称一致:

- 修改完成后,终端回到工作空间的根目录下,重新编译。
至此,地图配置完成,之后就可以使用自己的地图进行导航啦。
启动底盘和雷达
SSH连接OriginBot成功后,在终端中输入如下指令,启动机器人底盘和激光雷达:

Hint
由于底盘启动后会自动记录odom数据,所以每次运行导航功能前,都需要重启一次底盘,否则可能会导致TF树变换出错。
上位机可视化显示
为了便于发布导航的目标点,在同一网络下的PC端,启动上位机可视化软件:
Hint
确保在PC端已经完成originbot_desktop代码仓库的下载和编译。如果不方便使用originbot_desktop代码仓库,也可以使用“ros2 run rviz2 rviz2”单独启动Rivz2,手动添加map、tf、laserscan等显示插件,也可以达到类似的效果。
启动导航功能
通过SSH连接OriginBot,在终端中输入如下指令,启动Nav2导航功能包:


该功能已上线NodeHub,详细操作请见:Nav2移动机器人自主导航
启动成功后,会在终端中看到不断输出的信息,这是因为没有设置机器人初始位姿的缘故,后续启动Rviz之后会进行设置,暂时可以忽略。
Attention
如果先运行导航,再启动Rviz的话,可能无法在Rviz中看到静态地图,请确保先在PC端启动Rviz之后,再在机器人端启动导航功能。
单目标点导航
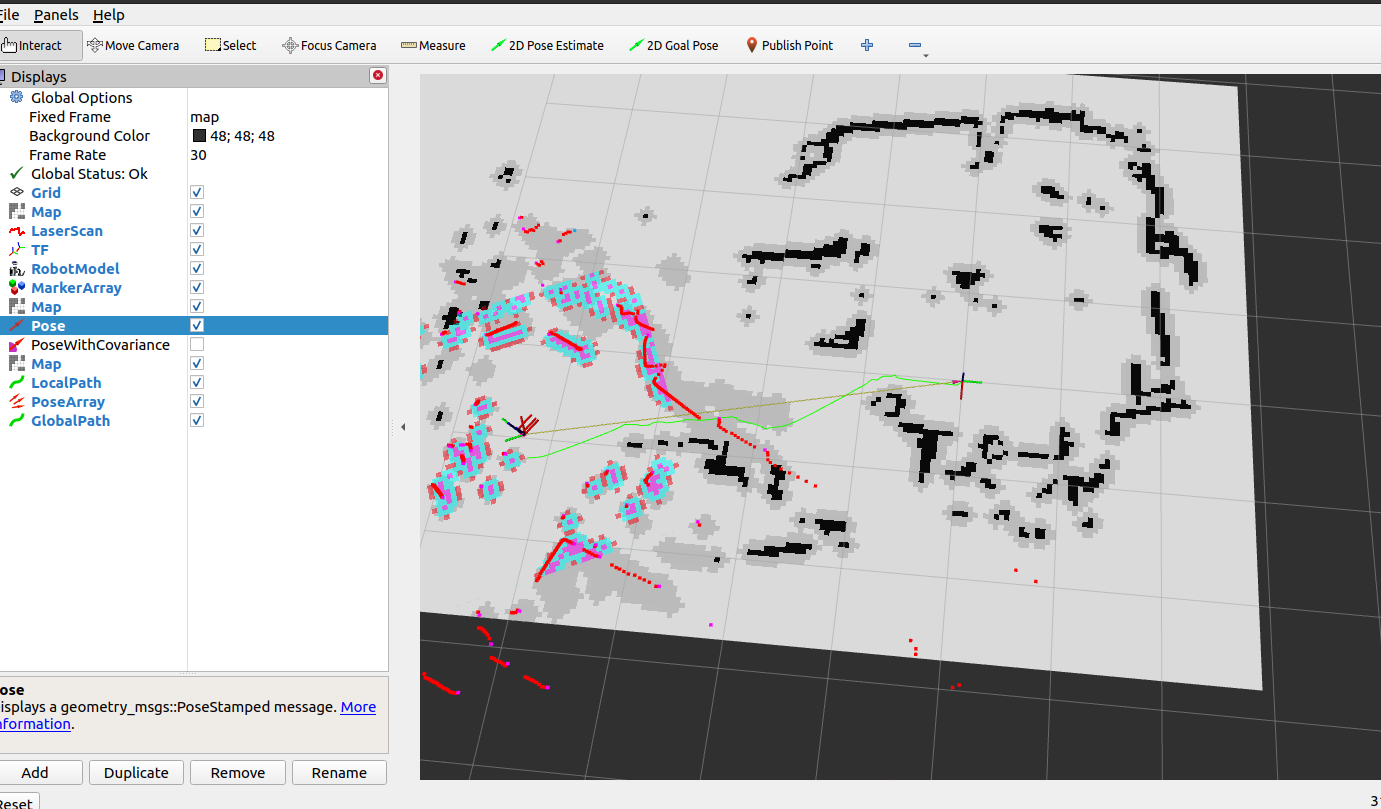
在打开的Rviz中配置好显示项目,点击工具栏中的初始状态估计“2D Pose Estimate”按钮,在地图中选择机器人的初始位姿,此时此前终端中的警告也会停止,然后点击目标位置选择“2D Goal Pose”按钮,在地图上选择导航目标点,即可开始自主导航。

多目标点导航
点击Rviz菜单栏中的Panels插件选项,从中选择Navigation2插件,点击OK。

Hint
此处如果找不到Navigation2插件的话,请使用“sudo apt install ros-${ROS_DISTRO}-nav2*”安装。
在左侧弹出的导航插件窗口中,点击“Waypoint mode”,进入多路点选择模式。

使用“Navigation2 goal”功能,选择多个需要导航经过的路点,选择完成后,点击插件中的“Start Navigation”按键,机器人导航运动开始,依次经过刚才选择的路点。

定点导航
成功编译功能包之后,可以在 originbot_navigation 中看到 send_goal 功能包,此功能包集成了定点导航的程序。
大家可以使用如下程序进行运行