套件组装

Attention
安装步骤预计需要30~60分钟,安装过程中请注意:
- 固定螺丝时,请勿大力拧紧螺丝,避免滑丝;
- 固定板卡时,请在四个铜柱或螺丝都固定之后,再分别拧紧;
安装机器人底盘
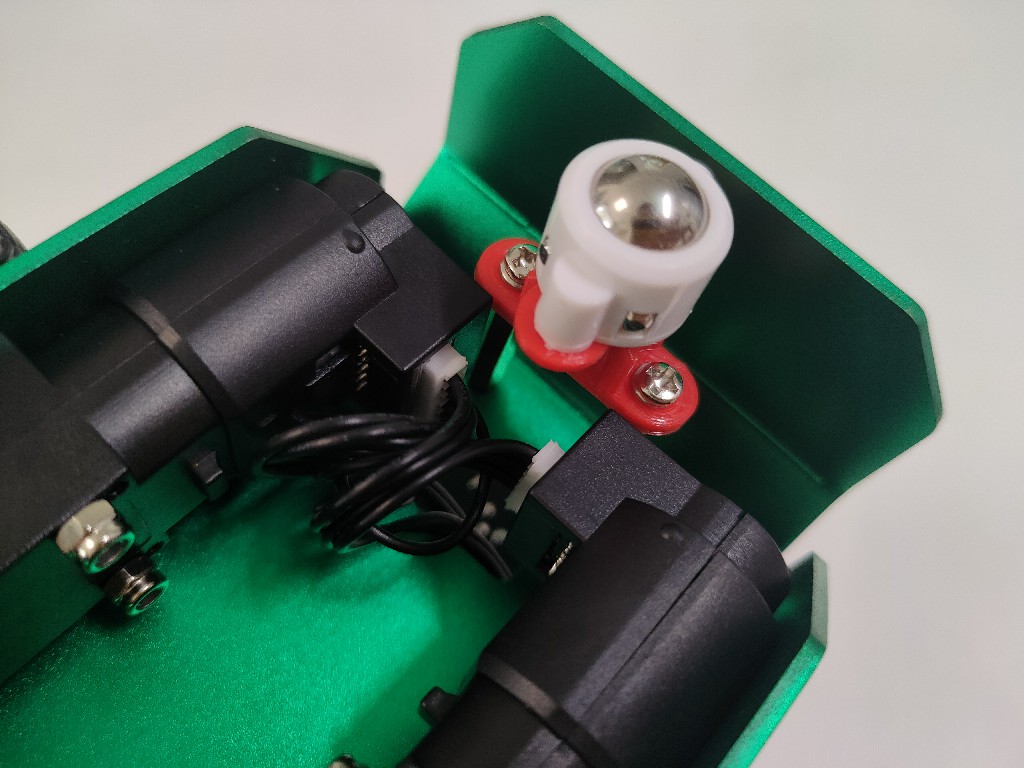
安装万向轮
所需物料:
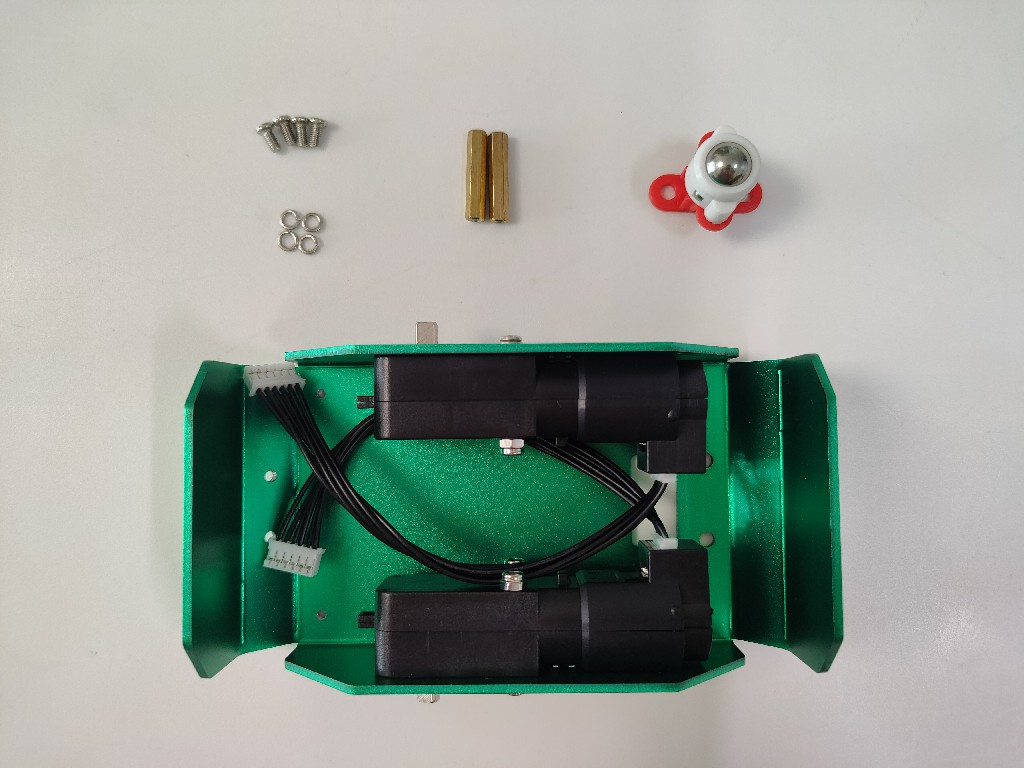
(1)安装万向轮支撑铜柱
在机器人底盘的反面找到两个铜柱的固定孔:
在底盘的正面使用螺丝和垫片拧紧铜柱:

(2)安装万向轮
使用螺丝和垫片,将万向轮固定在铜柱的末端:
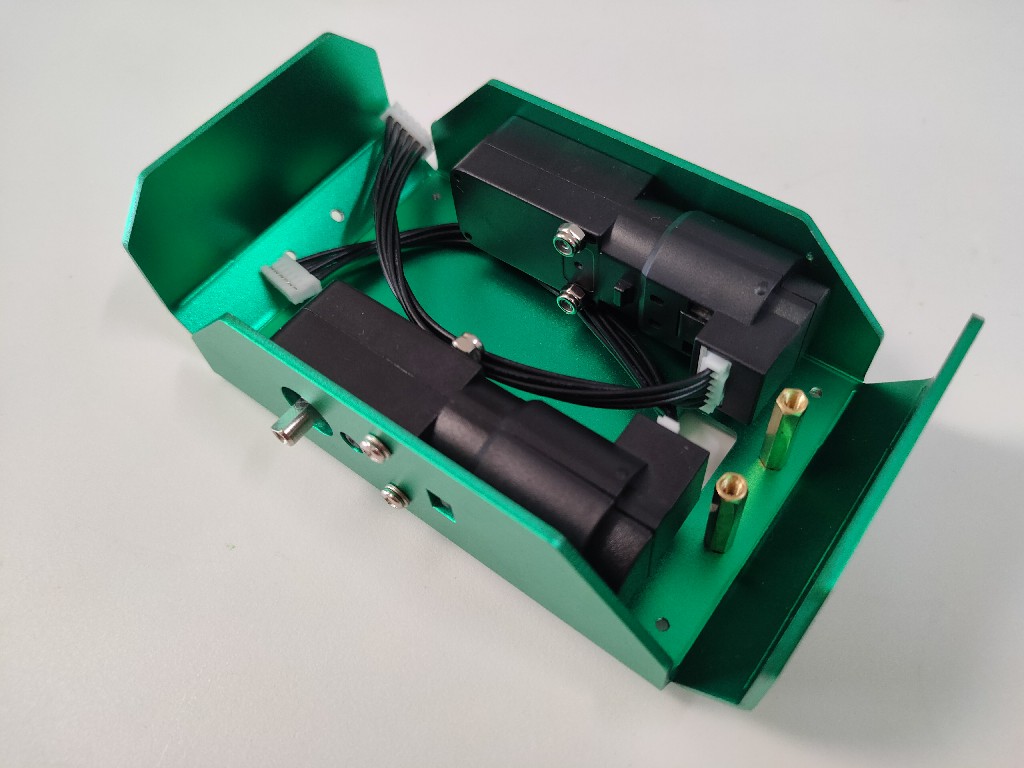
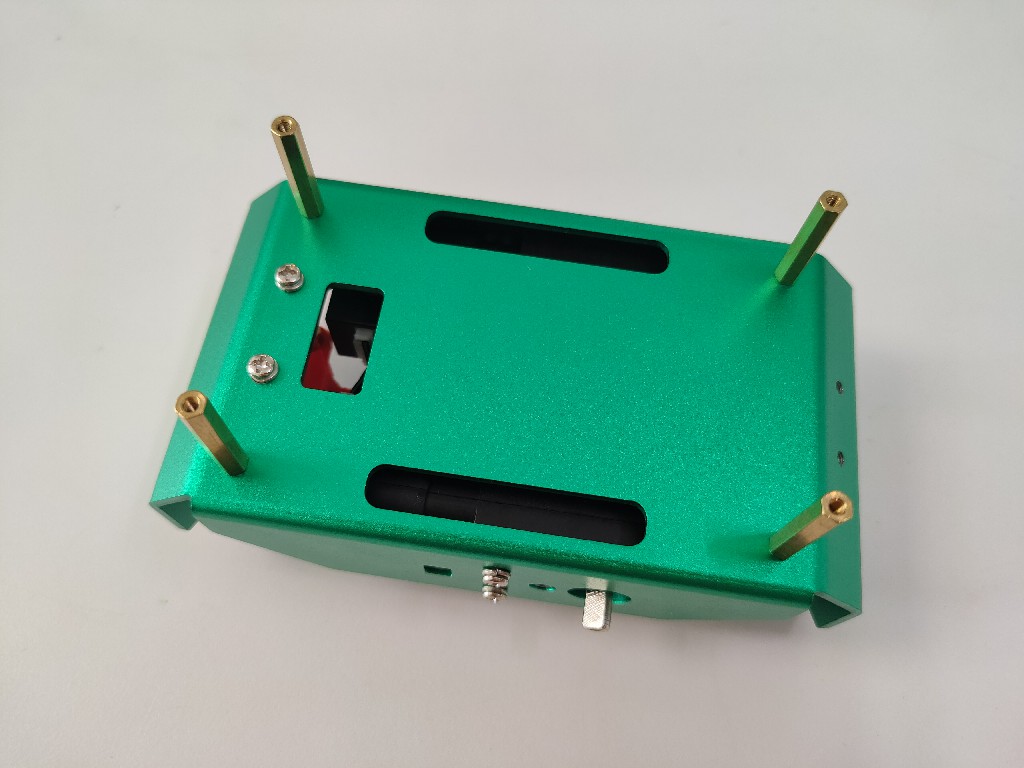
安装控制器支撑铜柱
所需物料:
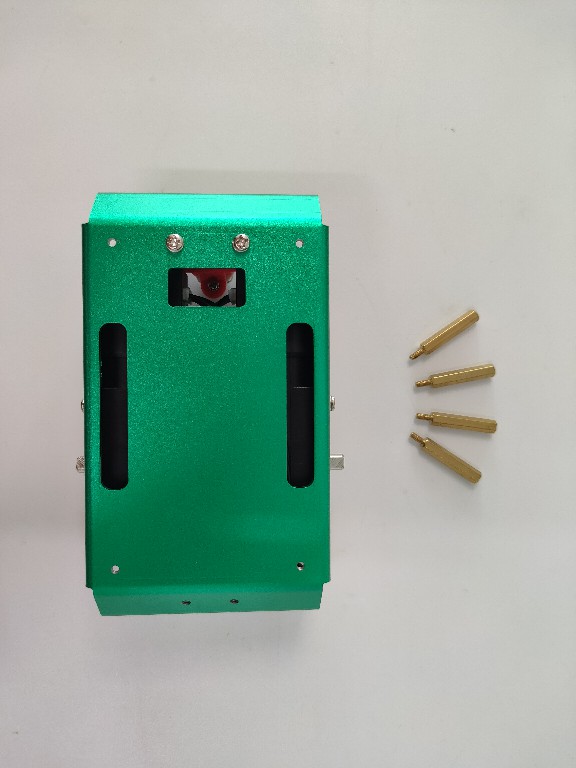
底盘的固定孔上自带螺纹,将四个铜柱直接拧紧即可:
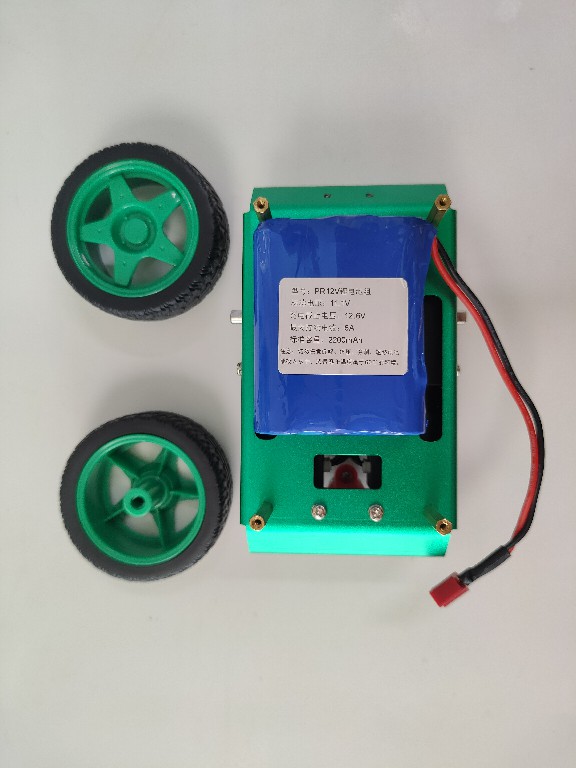
安装动力电池
所需物料:
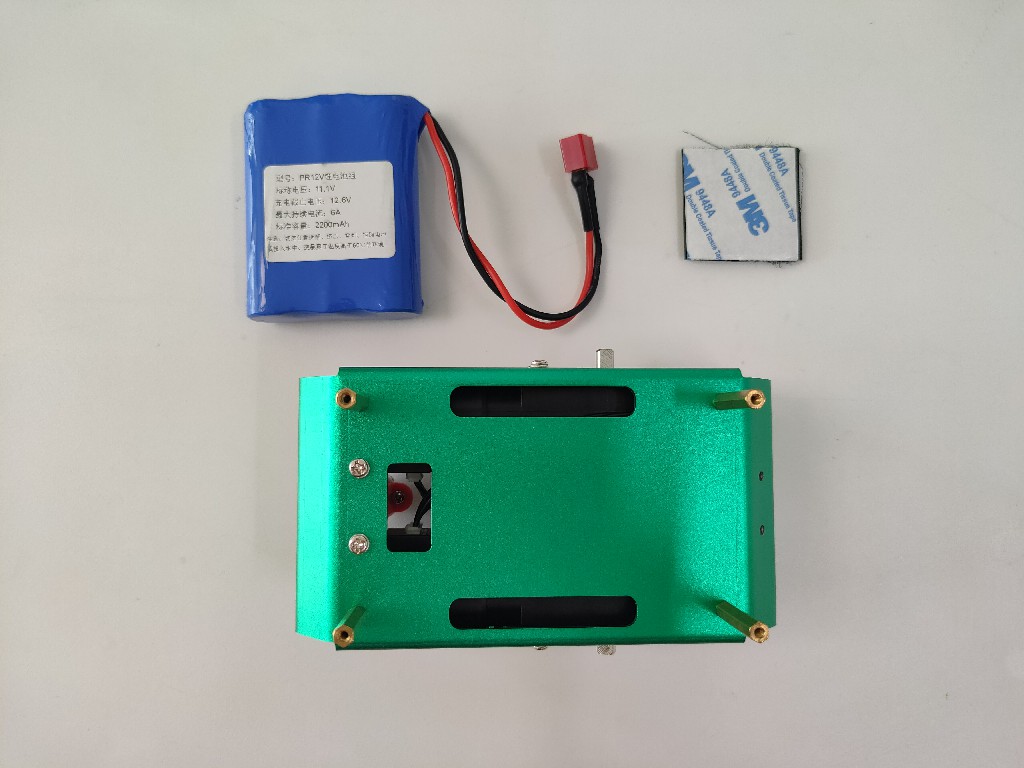
(1)安装魔术贴纸
撕掉魔术贴的双面胶,分别粘贴在底盘和电池上:
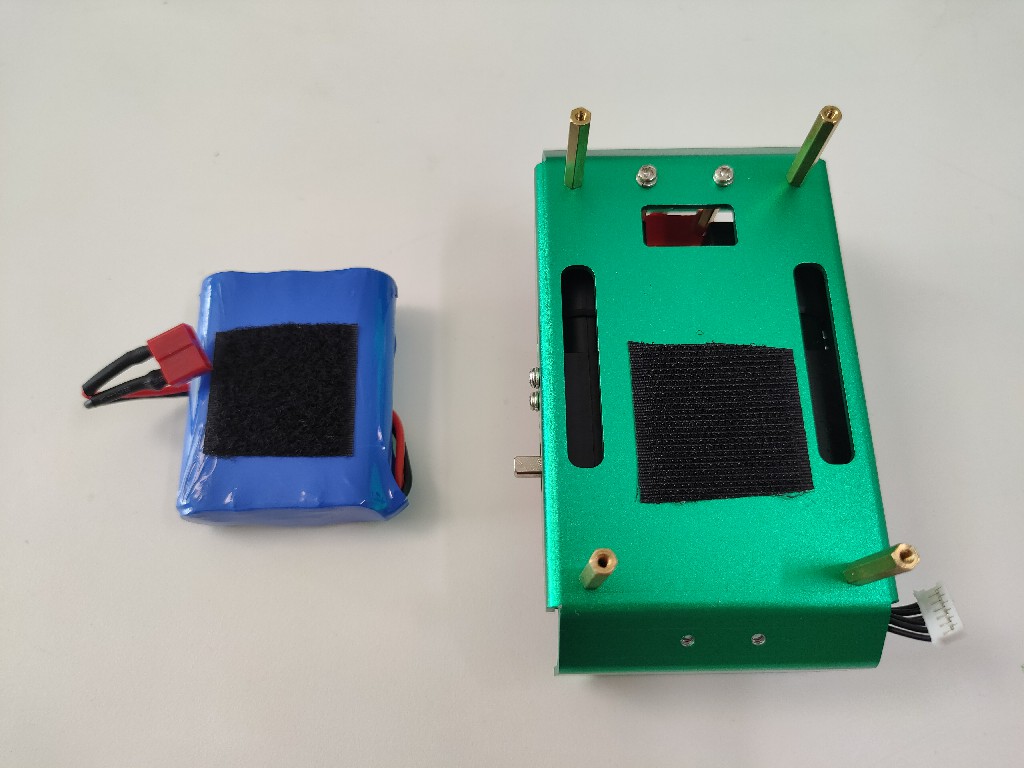
(2)安装电池
通过魔术贴将电池固定在底盘上,电池应尽量靠近左侧,保证重心在电机中轴上:

安装车轮
所需物料:
(1)安装车轮
将两个车轮分别按压固定在底盘两侧的电机轴上:
Hint
注意把握力道,避免损坏电机。
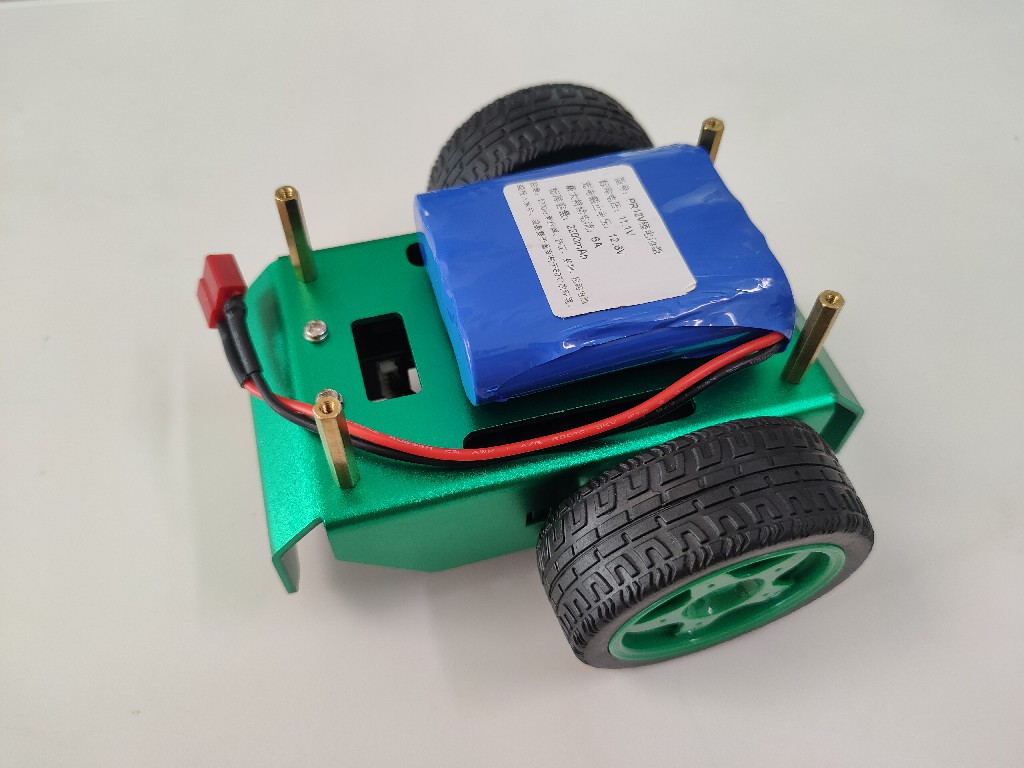
(2)整理电机线
将两个电机的线缆从底盘中穿出,便于后续接线,注意电机接线应连接牢固,避免出现接触不良:

安装控制器板卡
安装控制器上层支撑铜柱
所需物料:
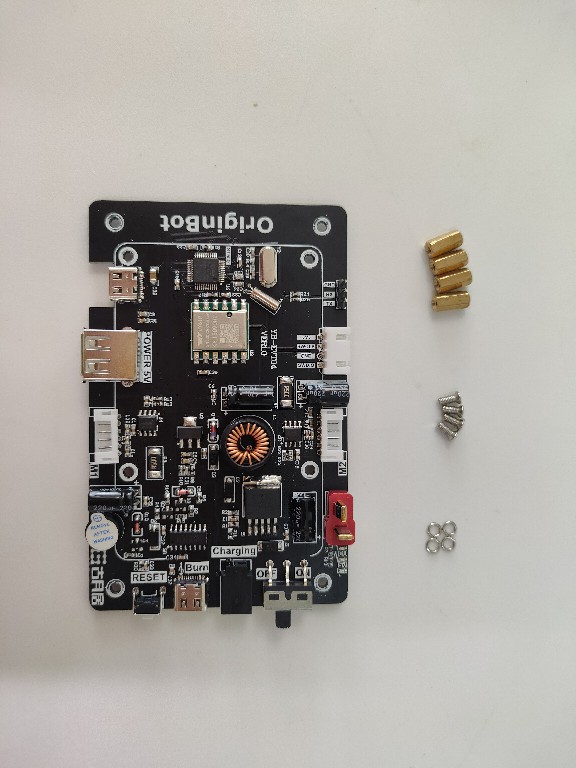
将铜柱放置于控制器的正面孔位,从反面使用螺丝和垫片拧紧:
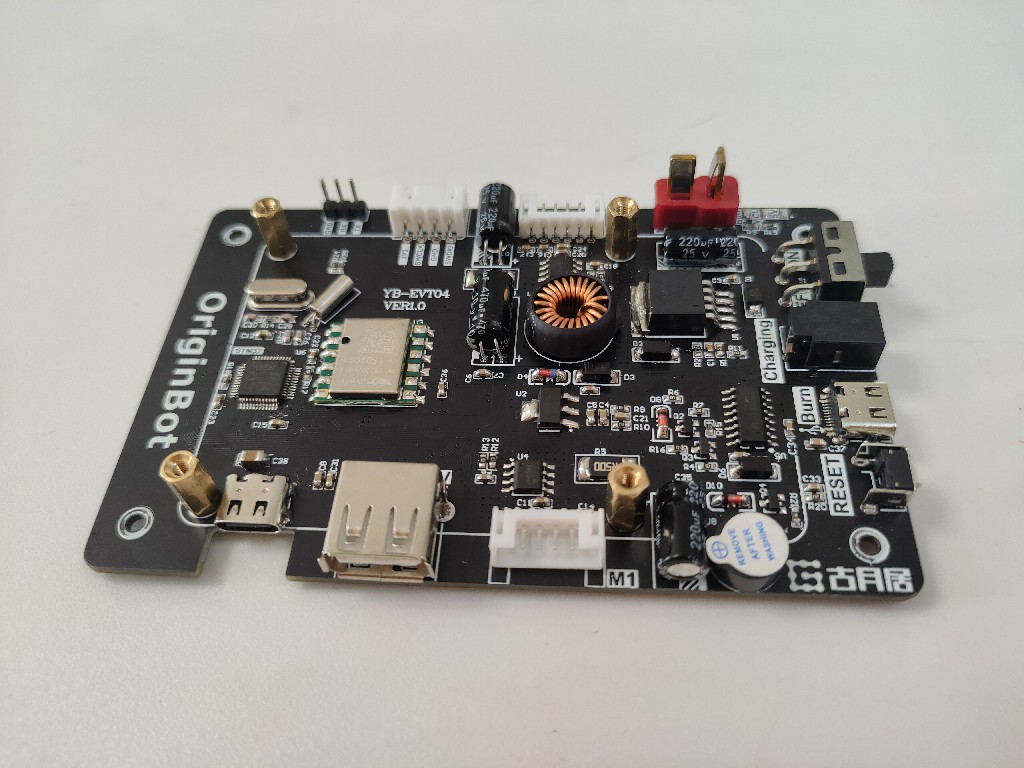
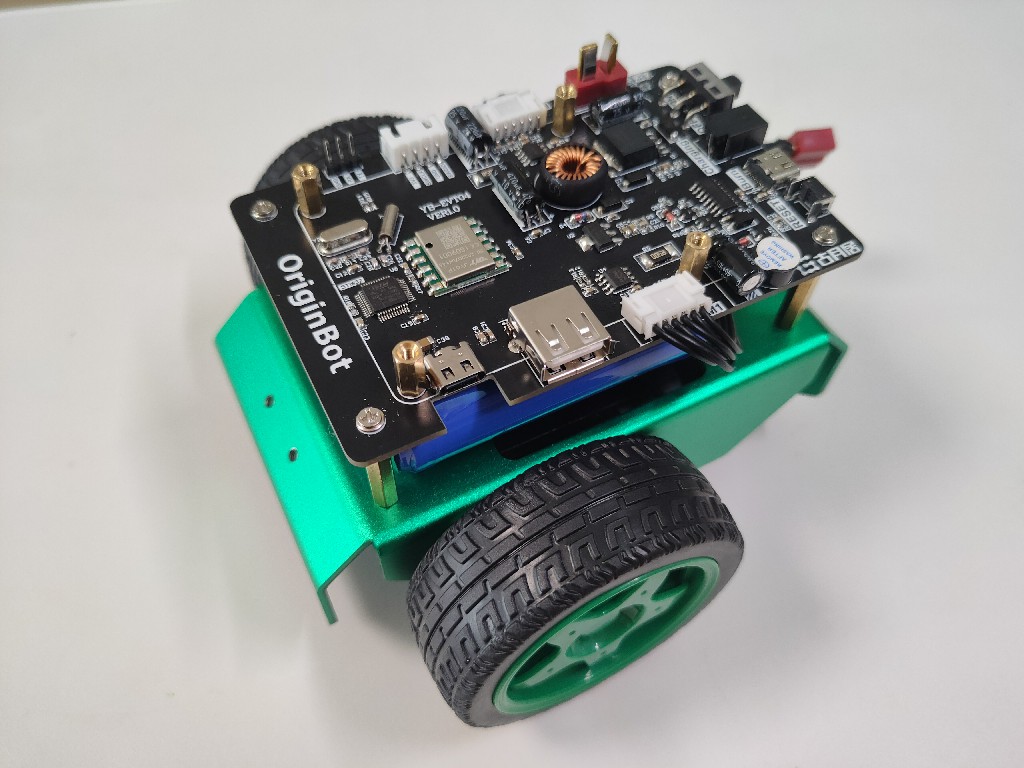
安装控制器板卡
所需物料:
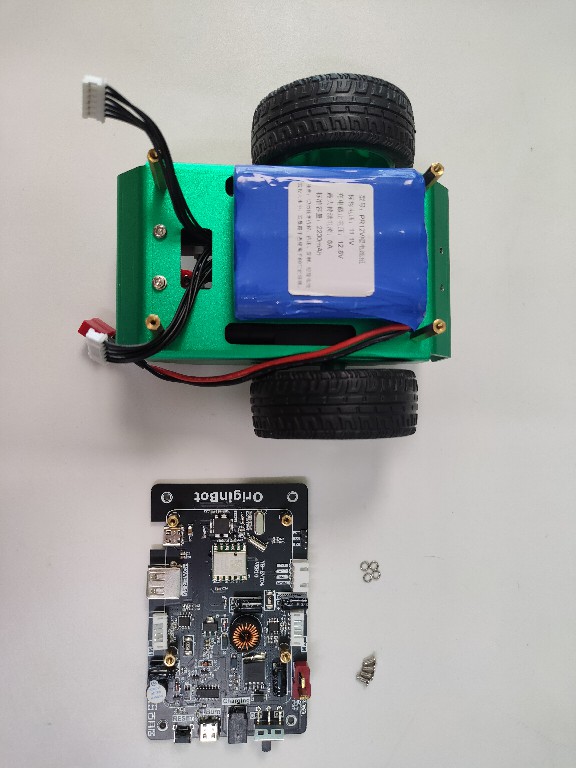
使用螺丝和垫片将控制器固定在底盘的4个支撑铜柱上:
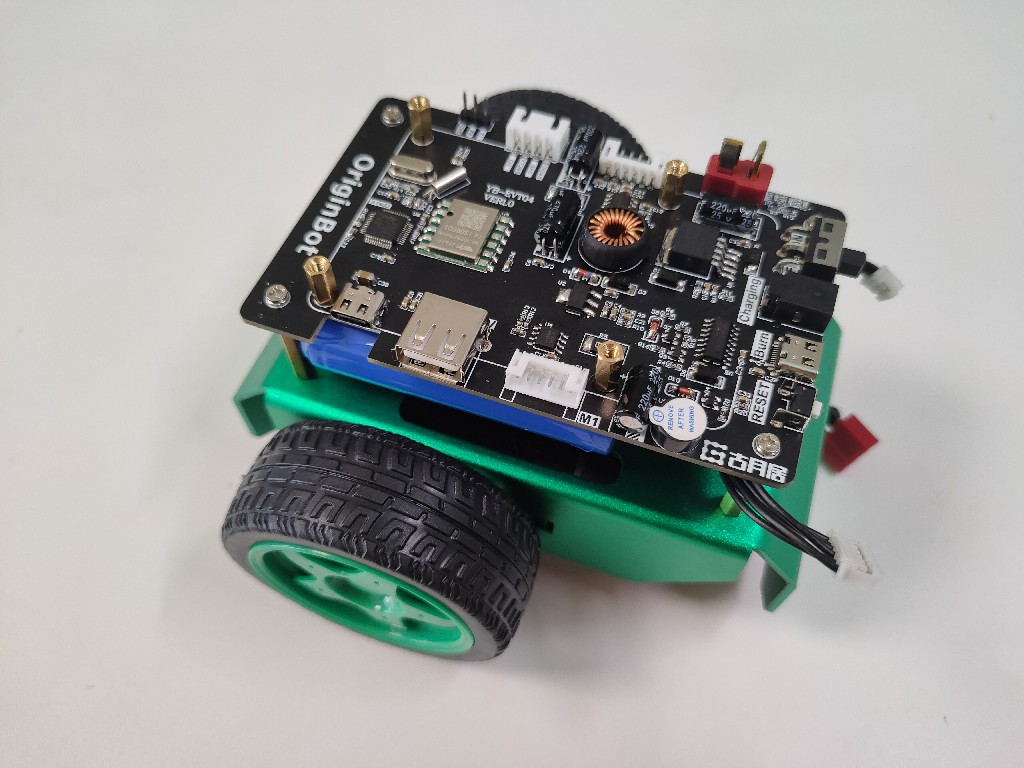
连接电机线
将之前穿出的电机线分别连接到控制器的对应端口:
Hint
- 注意电机接口序号,左侧电机连接控制左侧接口,右侧电机连接控制右侧接口;
- 插入白色端口时,建议用另外一只手按住控制器端的接口,避免用力过大翘起;
- 此时请勿连接电池电源线,避免后续误操作;
安装处理器板卡
安装处理器散热片与天线
Hint
RDK X3相比旭日X3派在WIFI能力上有增强,此处无需外接WIFI天线。
所需物料:
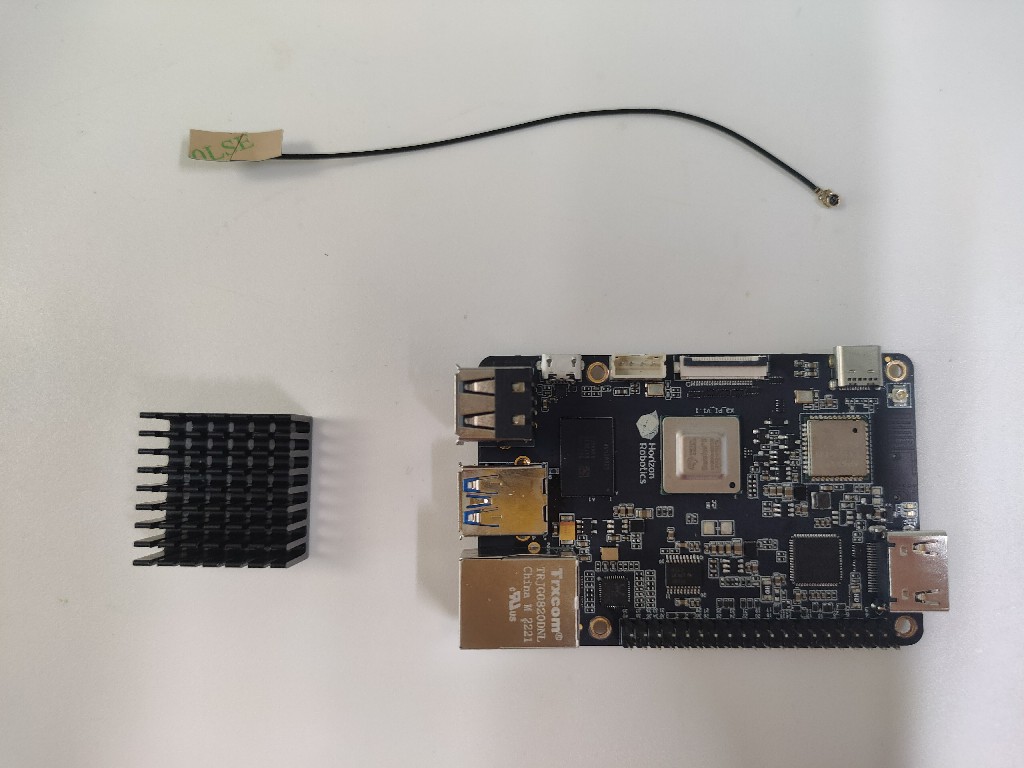
撕掉散热器背面蓝色的贴纸,使用自带的白色背胶贴到RDK X3的核心SoC上;再将天线按压连接到板卡对应的接口处:
安装处理器板卡
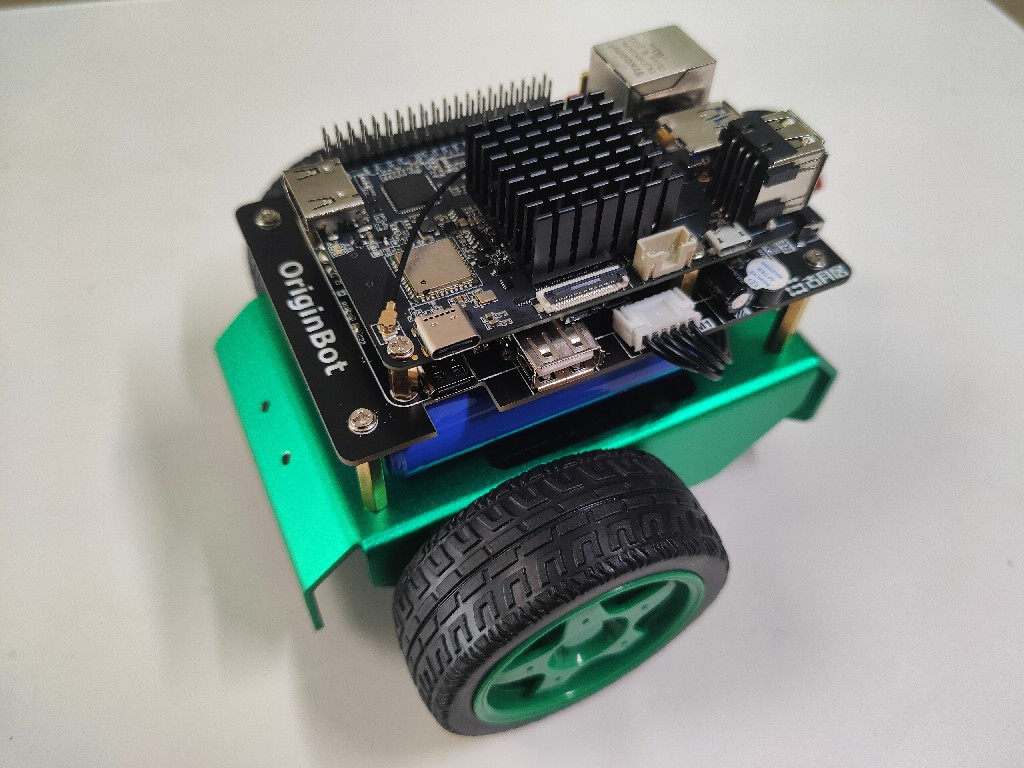
(1)AI视觉版本
所需物料:
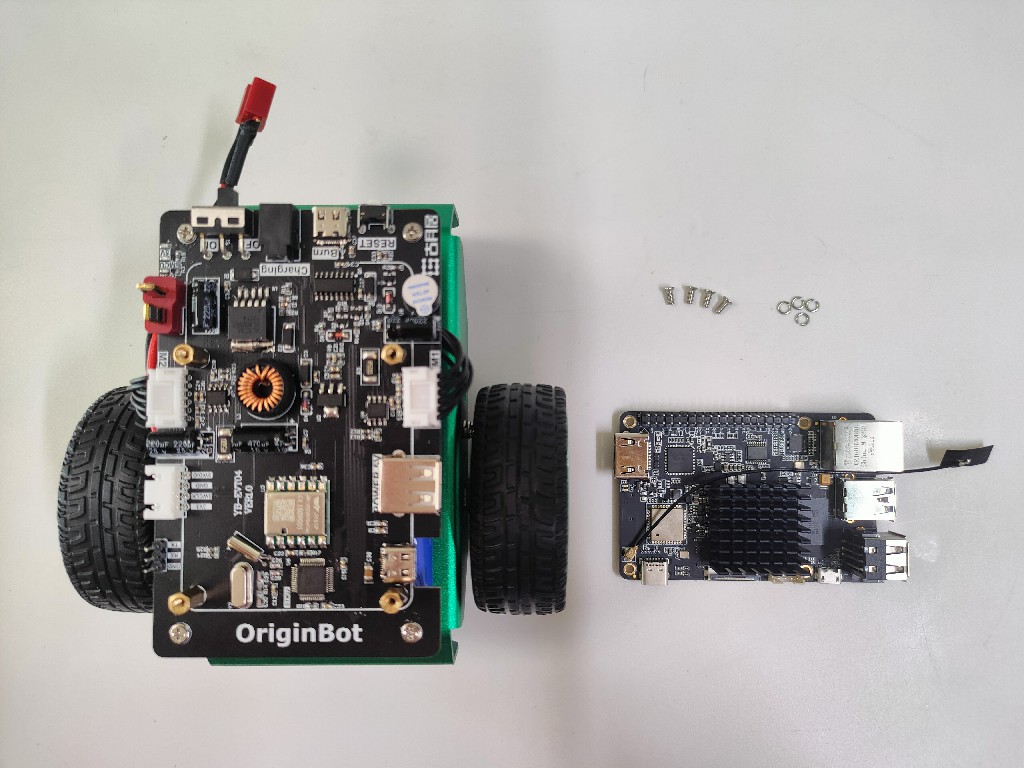
如果不需要安装激光雷达,可以直接通过螺丝和垫片将RDK X3安装到控制器上的支撑铜柱上:
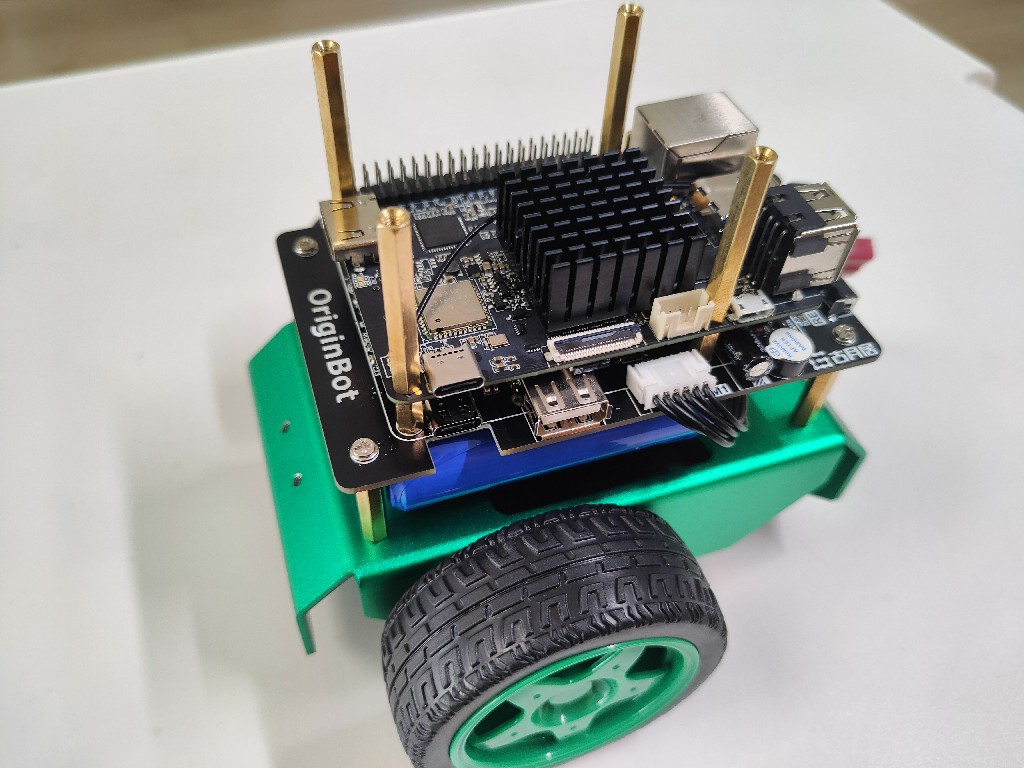
(2)自主导航版本
所需物料:
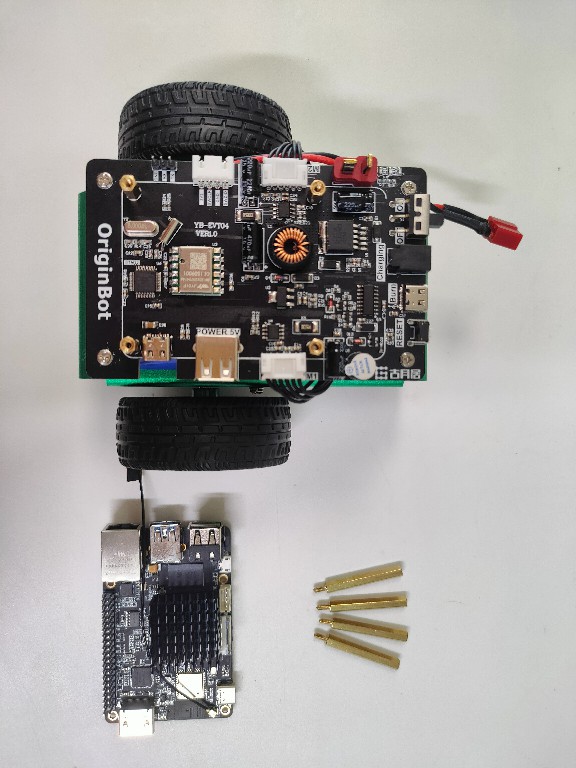
如果需要安装激光雷达,可以使用4个铜柱将RDK X3安装到控制器的支撑铜柱上:
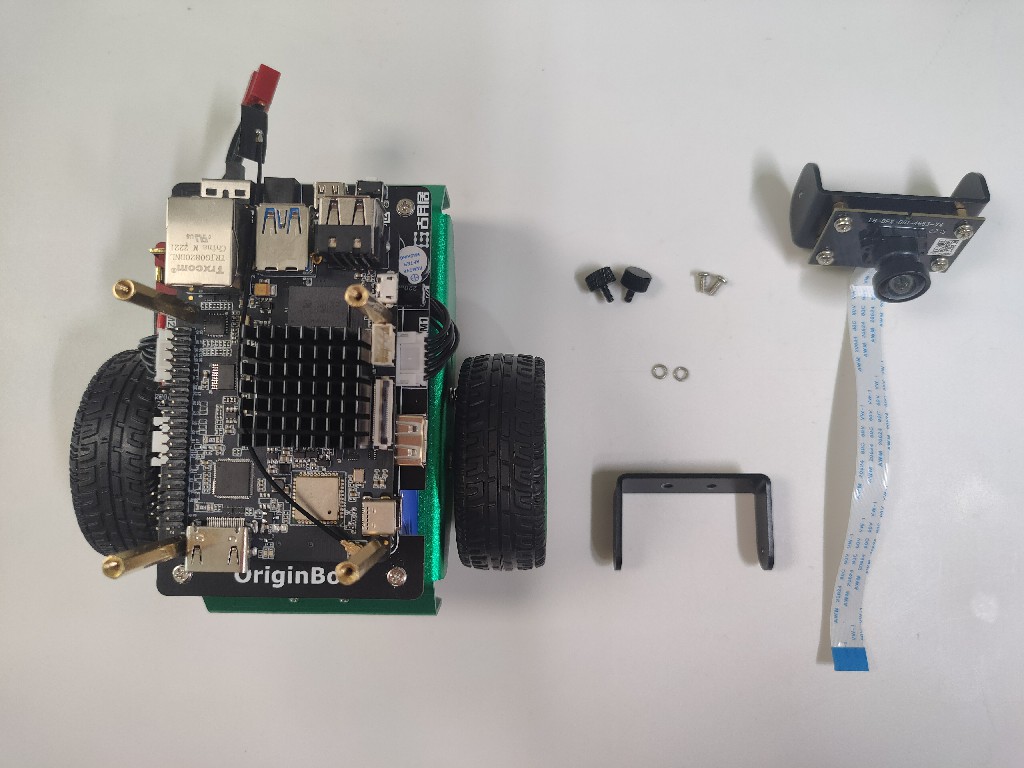
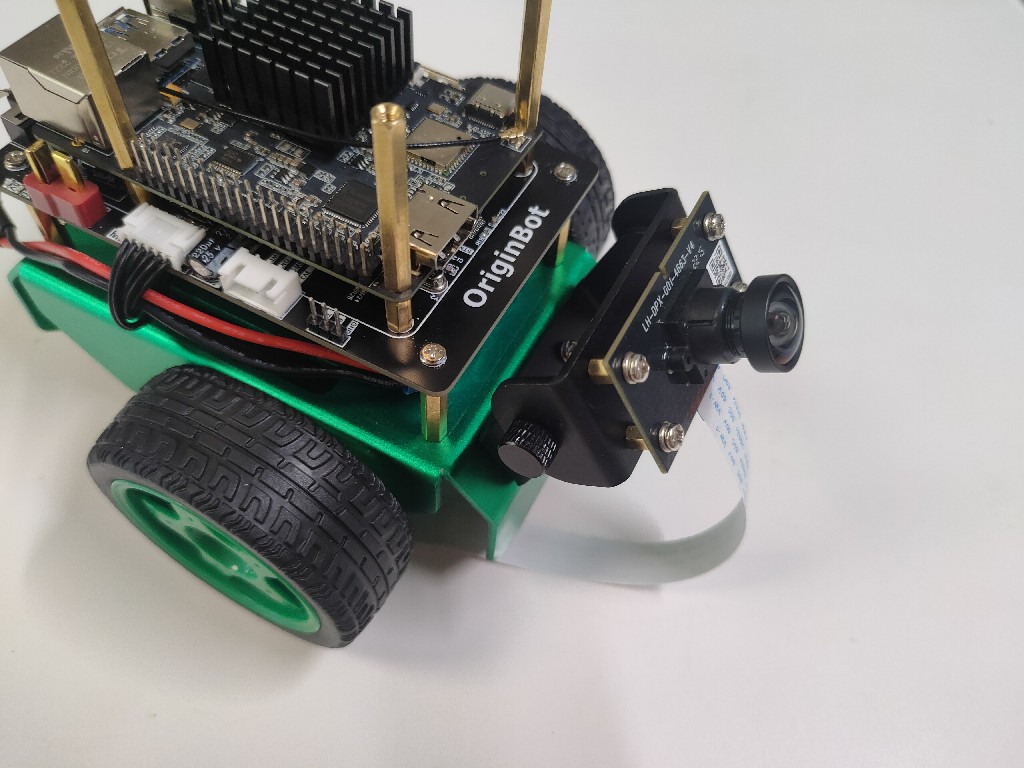
安装相机
安装相机模块
所需物料:

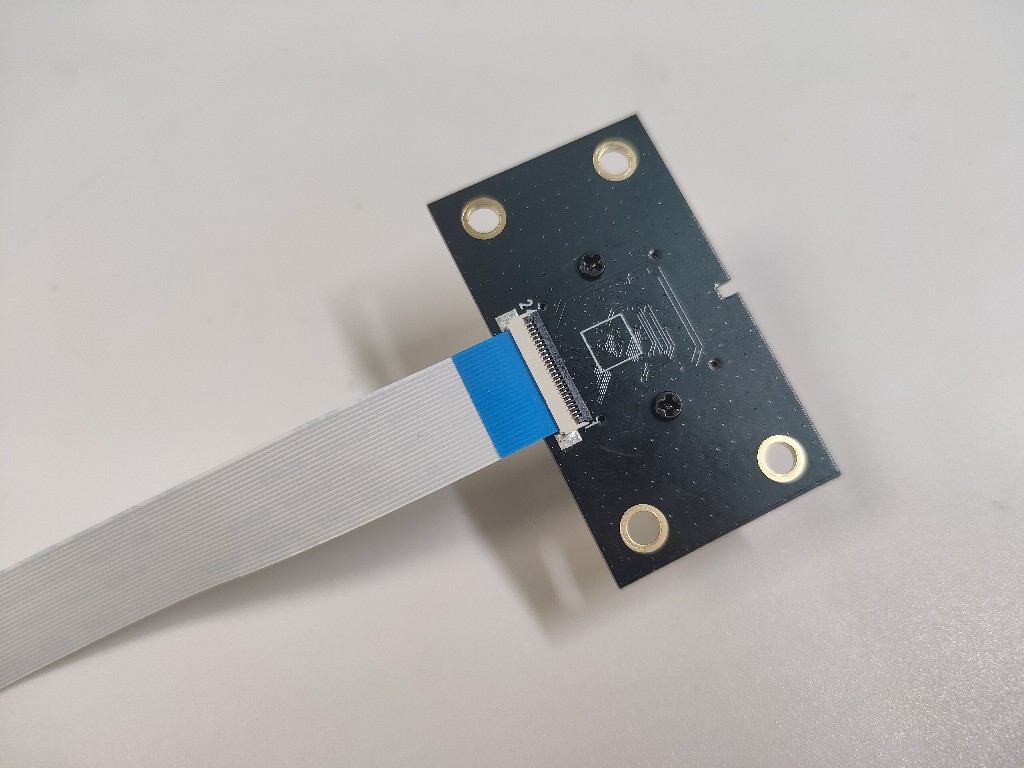
(1)连接相机数据线
轻抠相机背部的黑色卡扣,将排线的一段插入端口,再轻按黑色卡扣,完成连接:
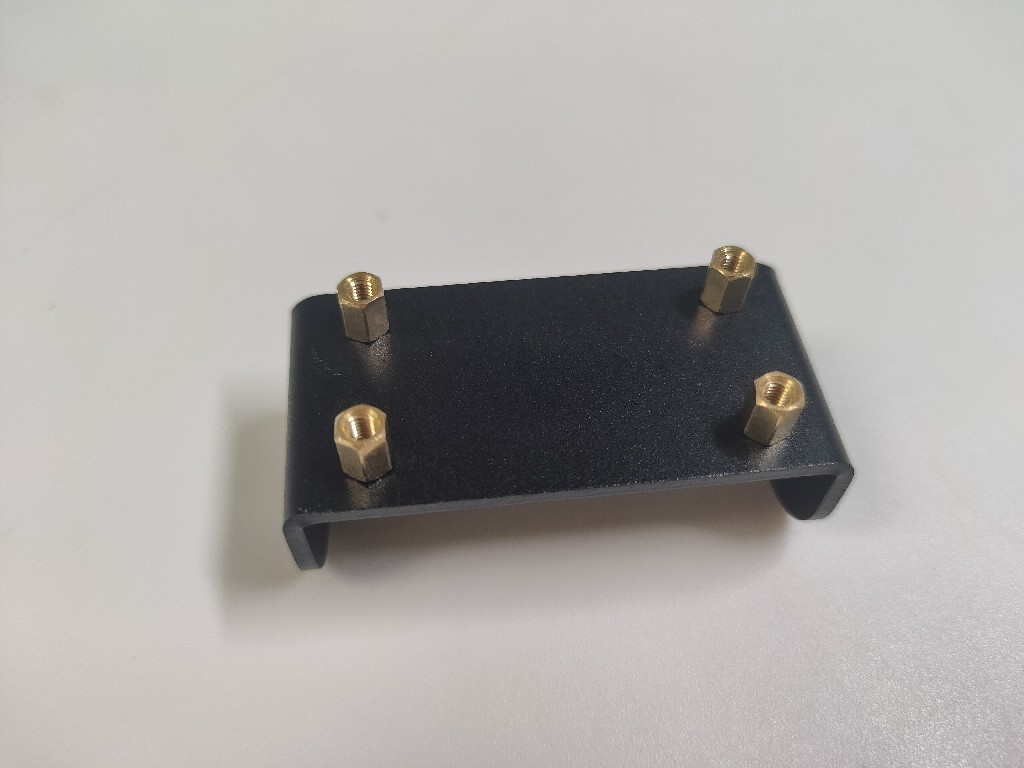
(2)安装相机固定架
相机固定架上自带螺纹,将4个铜柱直接拧紧:
(3)安装相机
使用四个螺丝加垫片,将相机模块安装在固定架上:

安装相机
所需物料:
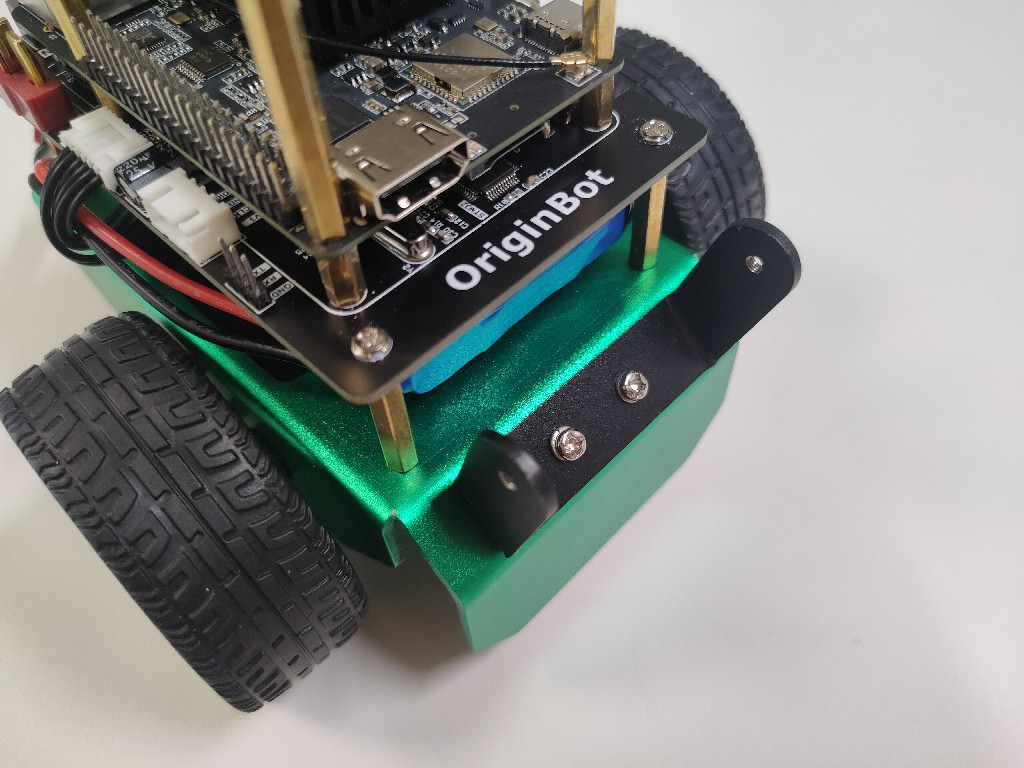
(1)安装相机支架
底盘的安装孔上自带螺纹,使用两个螺丝和垫片,将相机支架安装到底盘上:
(2)安装相机固定架
使用两个手拧螺丝将相机固定架安装在支架上:
Hint
相机固定架与支架之间的需要有足够的摩擦力,如果相机无法固定角度,可以用手向外掰一下相机支架,再安装固定架。
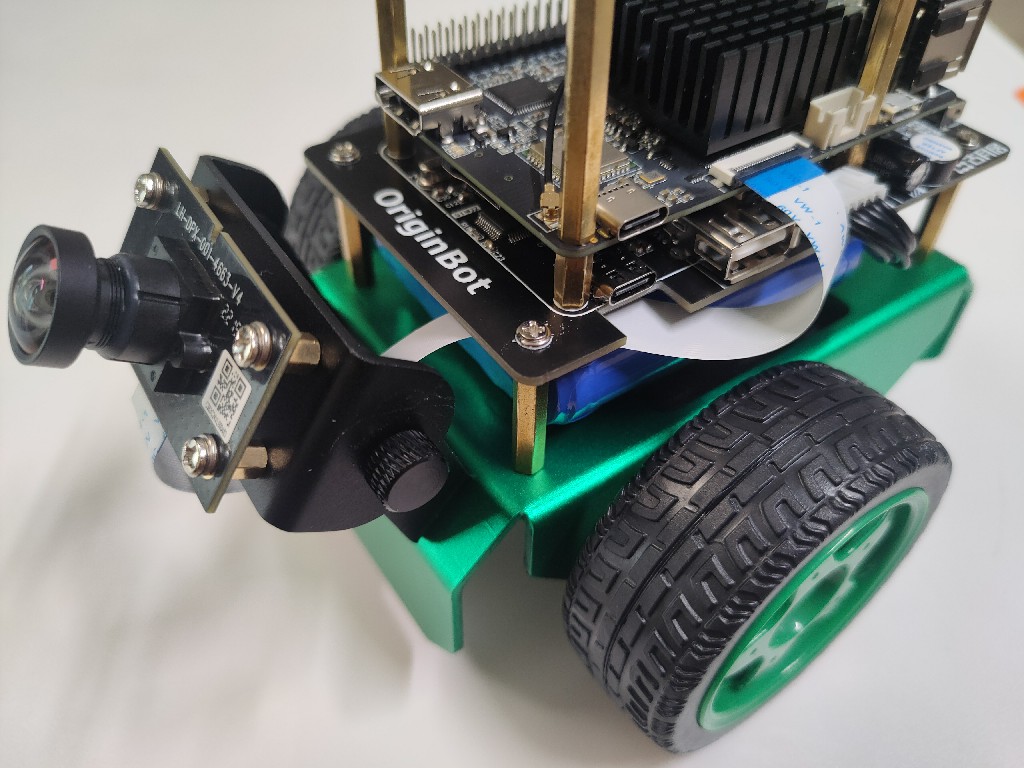
(3)连接相机数据线
将相机的排线从底盘控制器与电池之间穿过,连接到RDK X3的接口上:
Danger
禁止在上电的情况下拔插相机排线,会损毁相机。
安装激光雷达
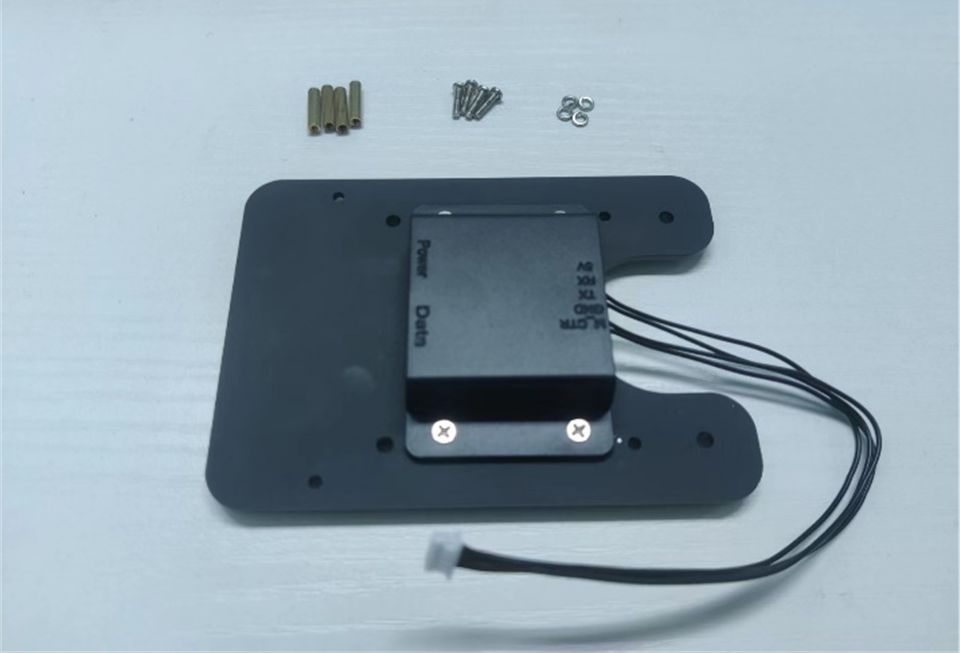
安装雷达串口模块
所需物料:
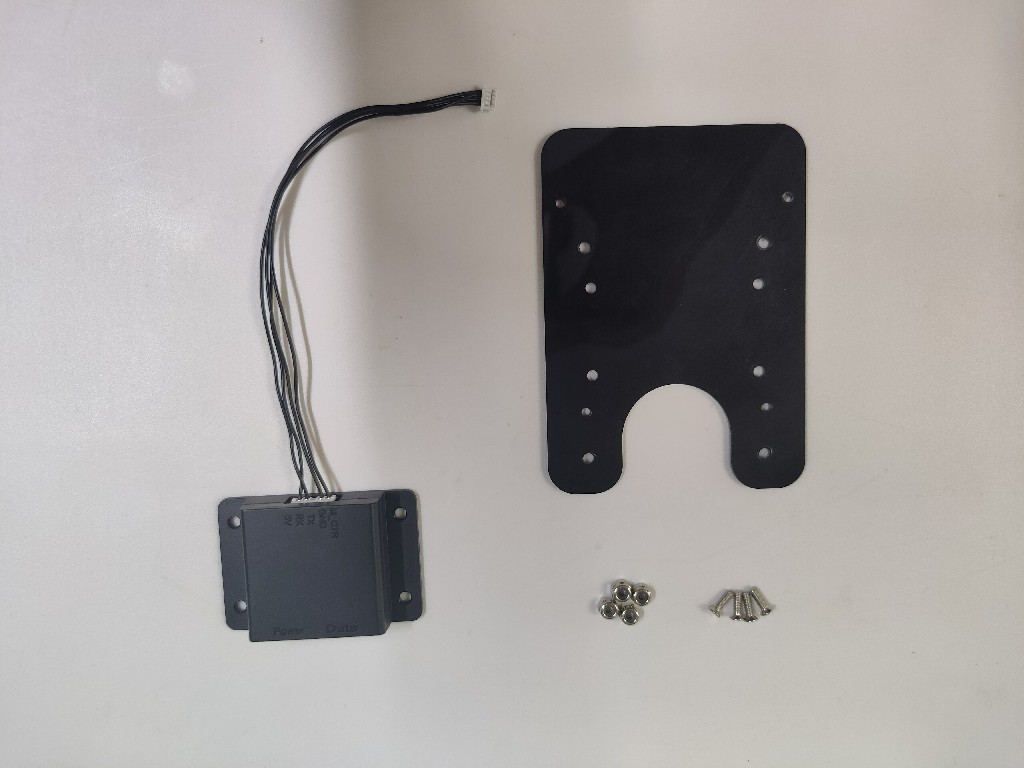
撕掉亚克力板的保护膜,使用4个螺丝将雷达的串口模块安装到亚克力板上:
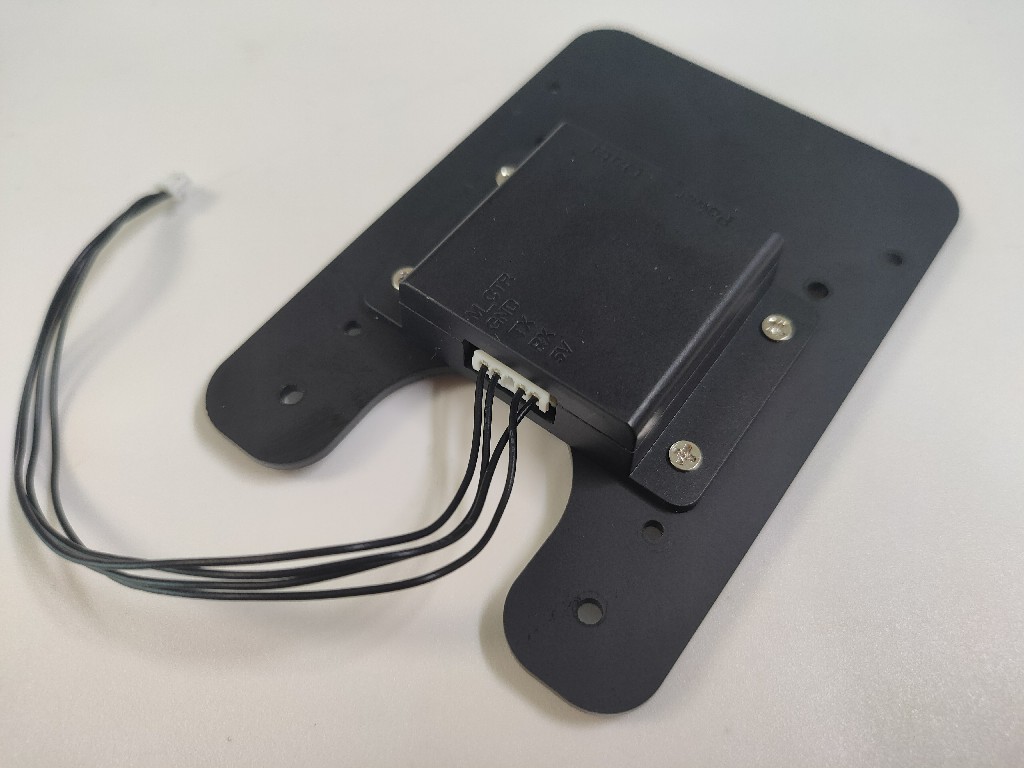
在亚克力板的另外一侧,使用四个防滑螺母,拧紧螺丝:

安装雷达支架
所需物料:
将四个铜柱穿过到亚克力板对应的孔位:
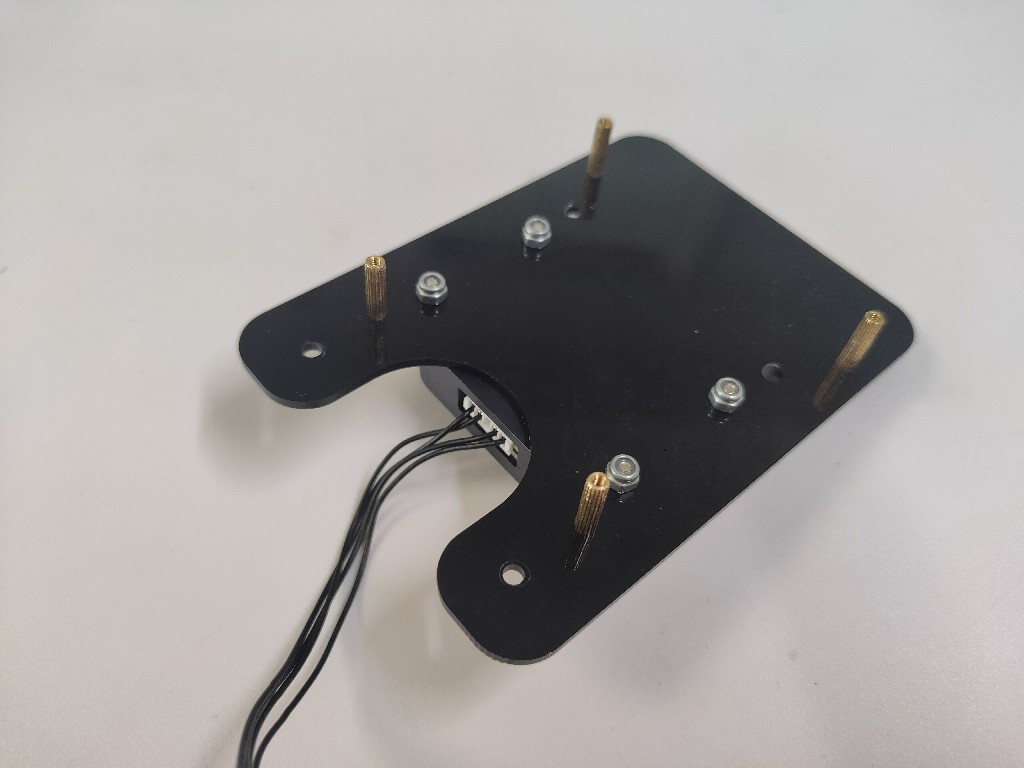
另外一侧通过四个防滑螺母固定,拧紧铜柱:

安装雷达亚克力板
所需物料:
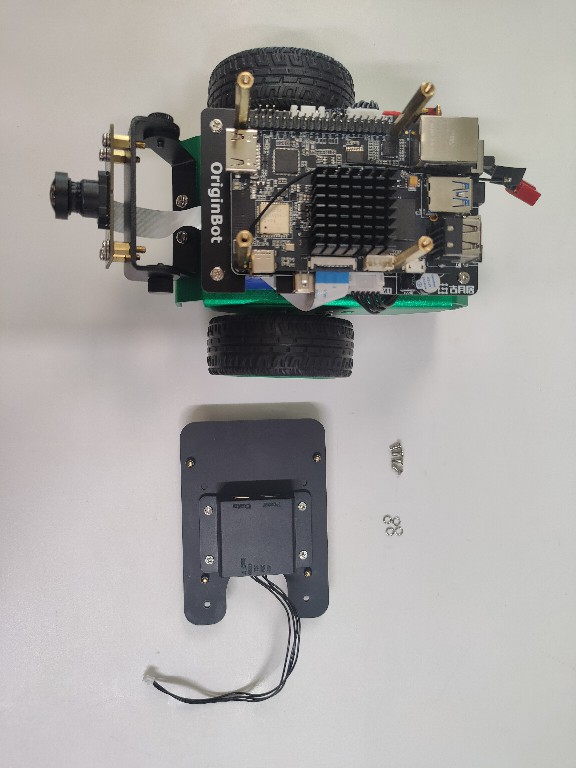
使用四个螺丝和垫片,将亚克力板安装到RDK X3上的四个铜柱末端:
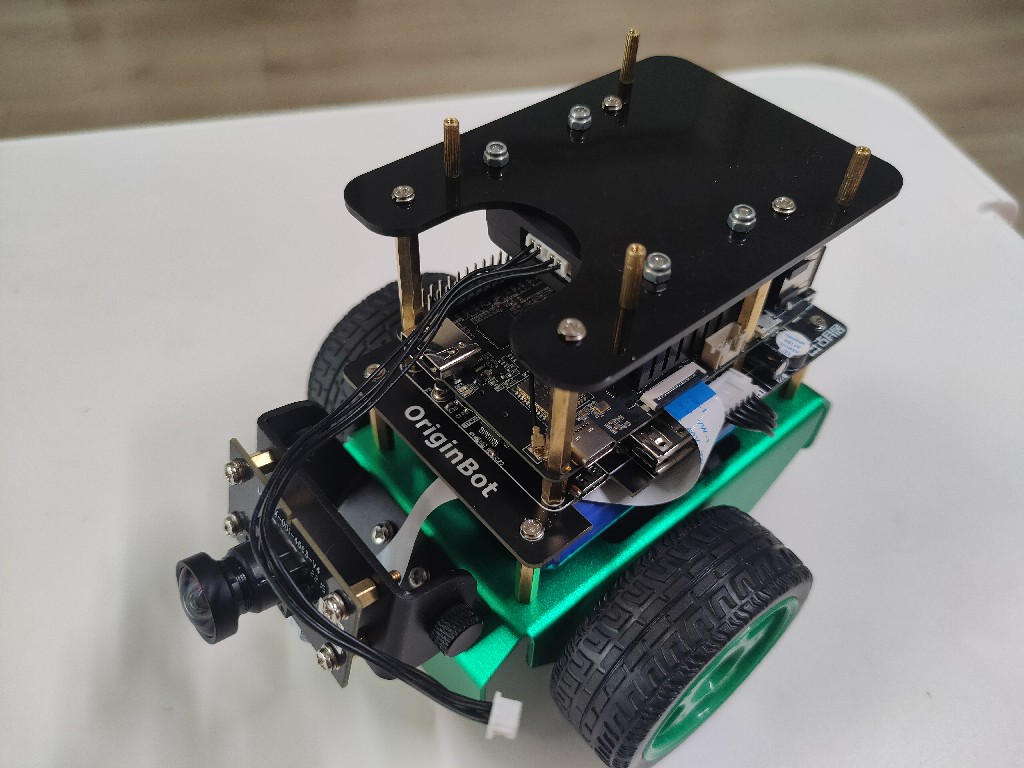
安装雷达
所需物料:
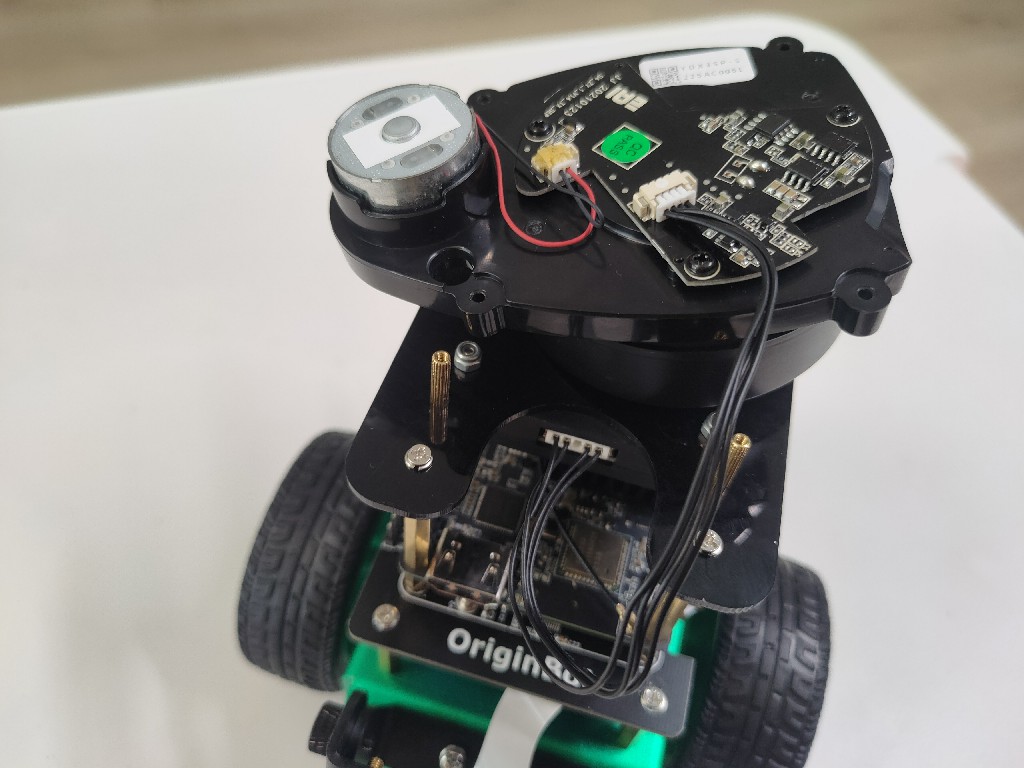
(1)连接雷达串口线
将雷达串口模块引出额串口线连接到雷达背面对应接口:
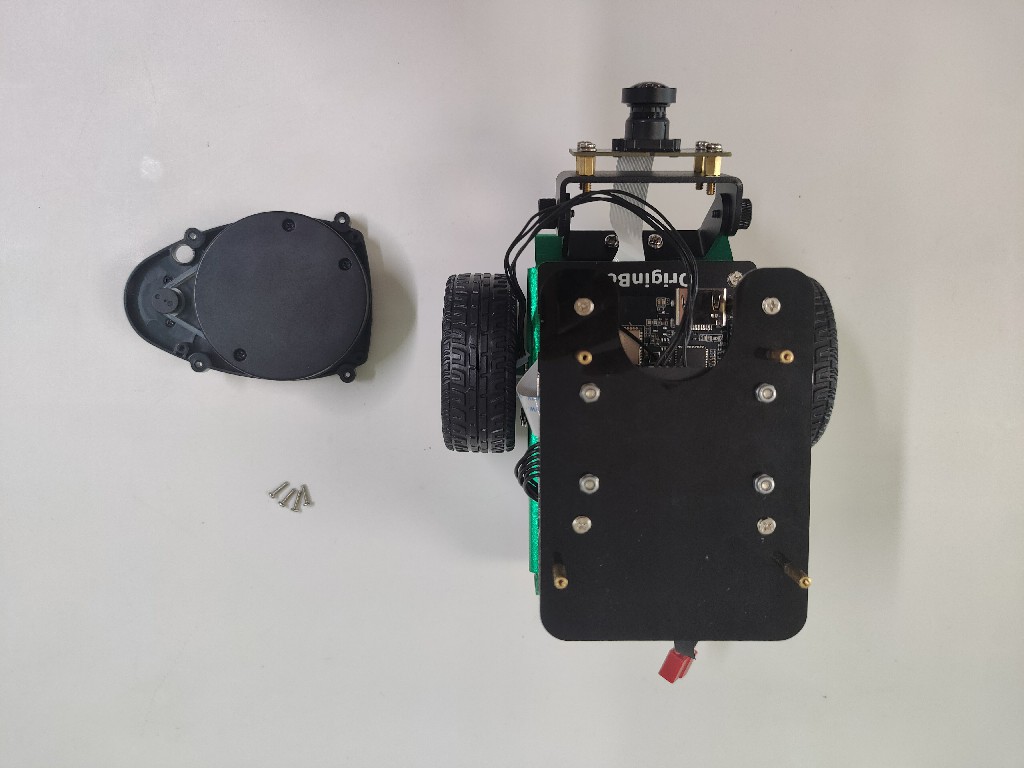
(2)安装雷达
使用四个螺丝将雷达固定到亚克力板的支撑铜柱上:
连接线缆
所需物料:

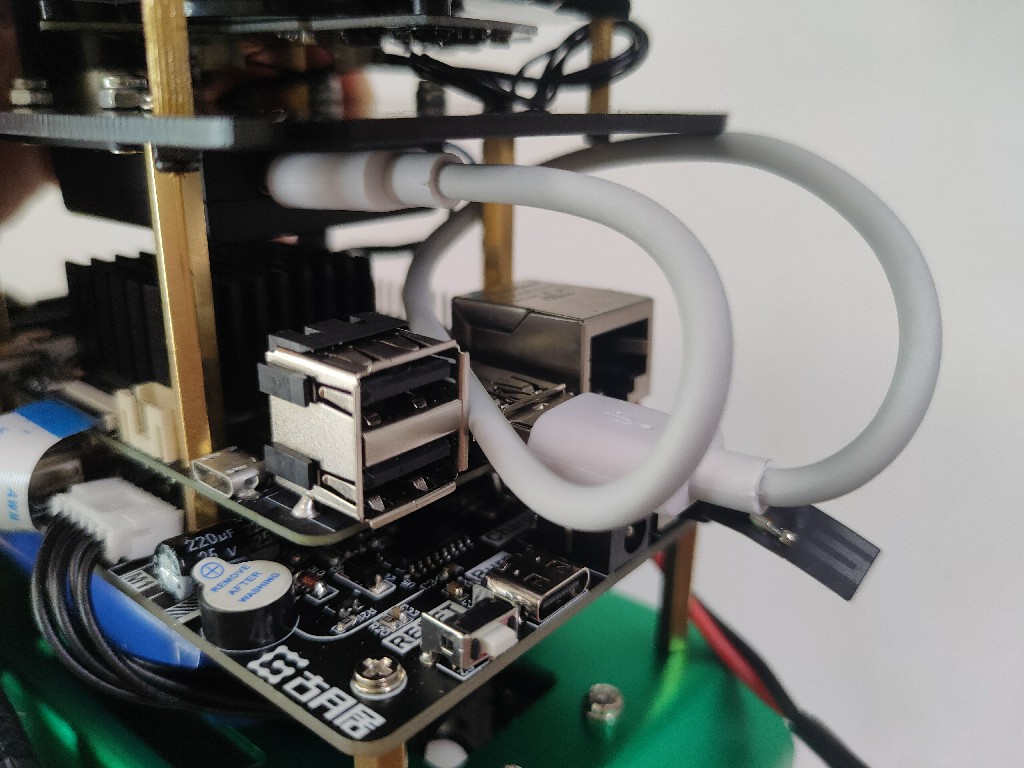
(1)连接供电模块
RDK X3由控制器通过TypeC口进行供电,使用TypeC供电模块连接控制器的电源输出和RDK X3的电源输入:
Hint
插拔TypeC供电模块时,请小心用力,避免损坏贴片引脚。
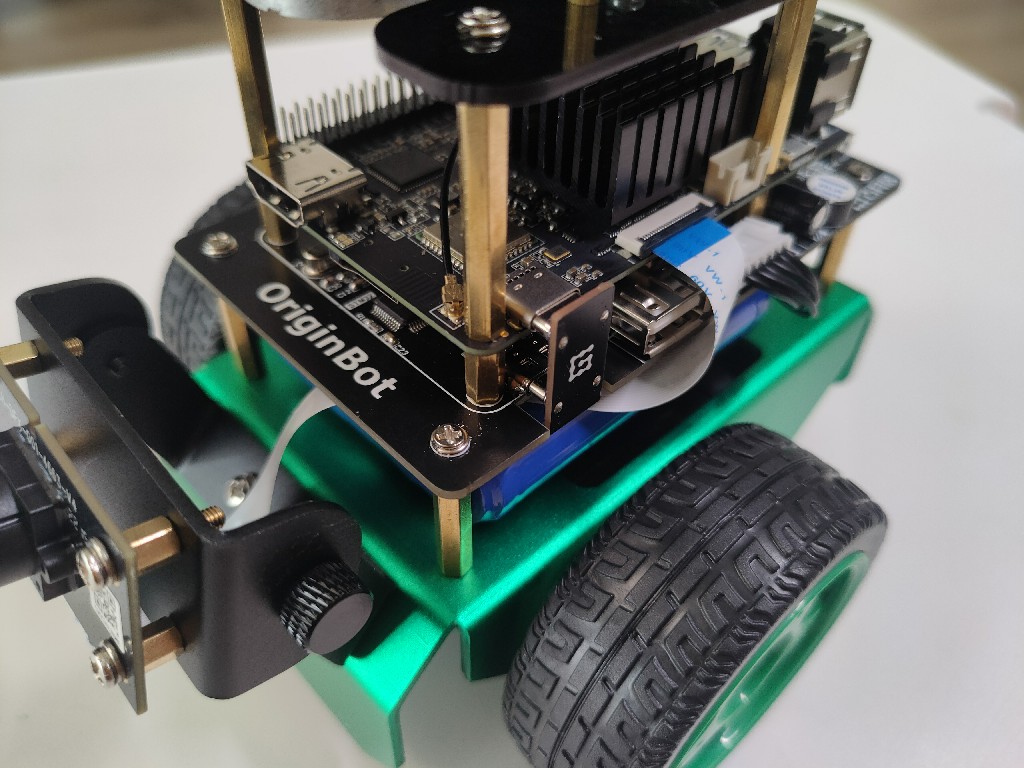
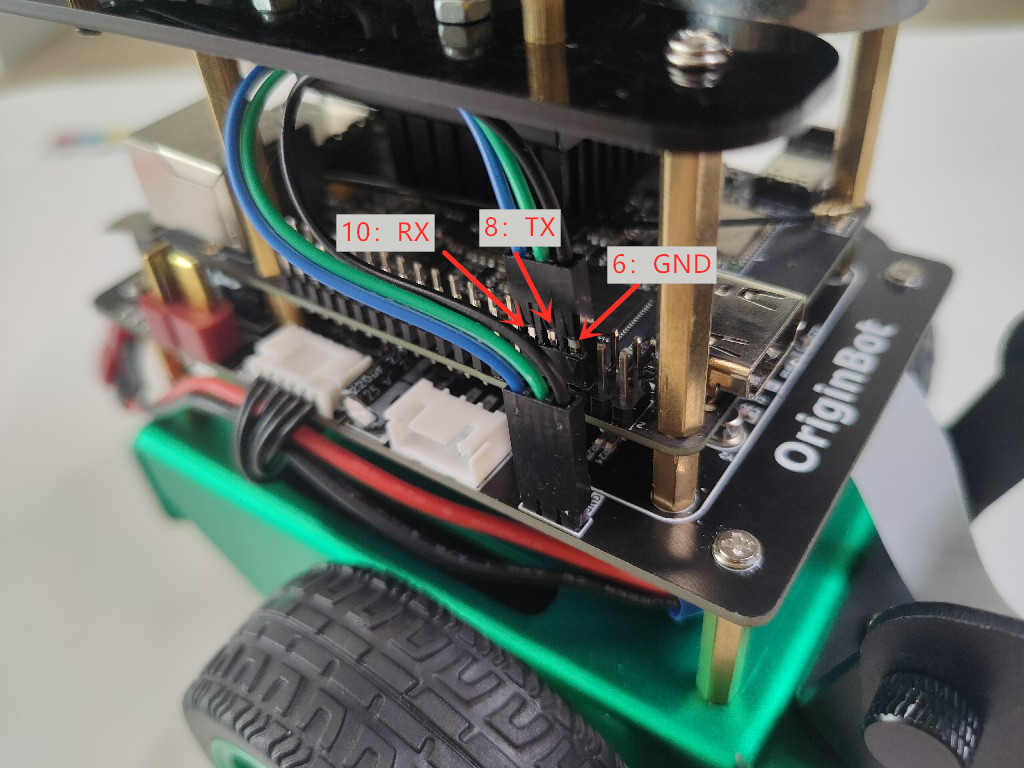
(2)连接串口通信线
使用串口通信线连接控制器和RDK X3的通信接口:
(3)连接雷达通信线
雷达原装的TypeC数据线较长,可以使用套件中的短线,一侧连接RDK X3的USB口,另外一侧连接雷达串口模块的TypeC口:
(4)连接总电源线
检查机器人各部分已经按照操作步骤正确安装,且控制的开关处于“OFF”状态,连接电池的总电源线至控制器:
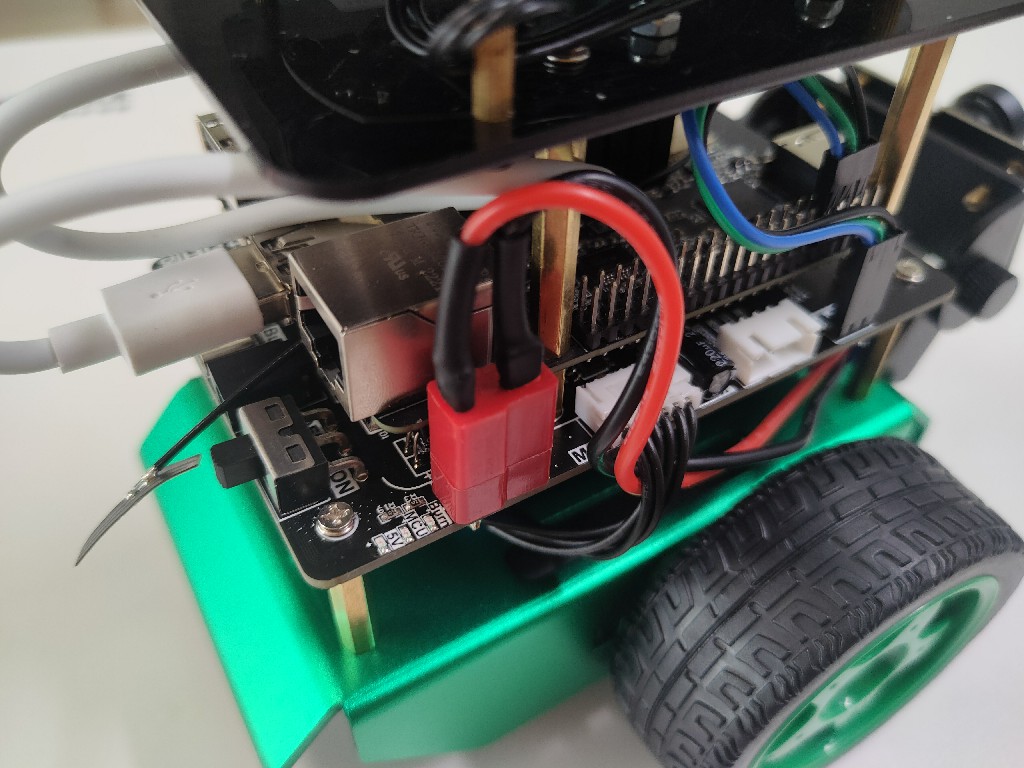
Hint
电源插口较紧,且距离RDK X3较近,请谨慎安装插入。将T形插头的两个平面部分贴近插座会相对好插一些。
安装车牌和雷达贴纸(可选)
所需物料:
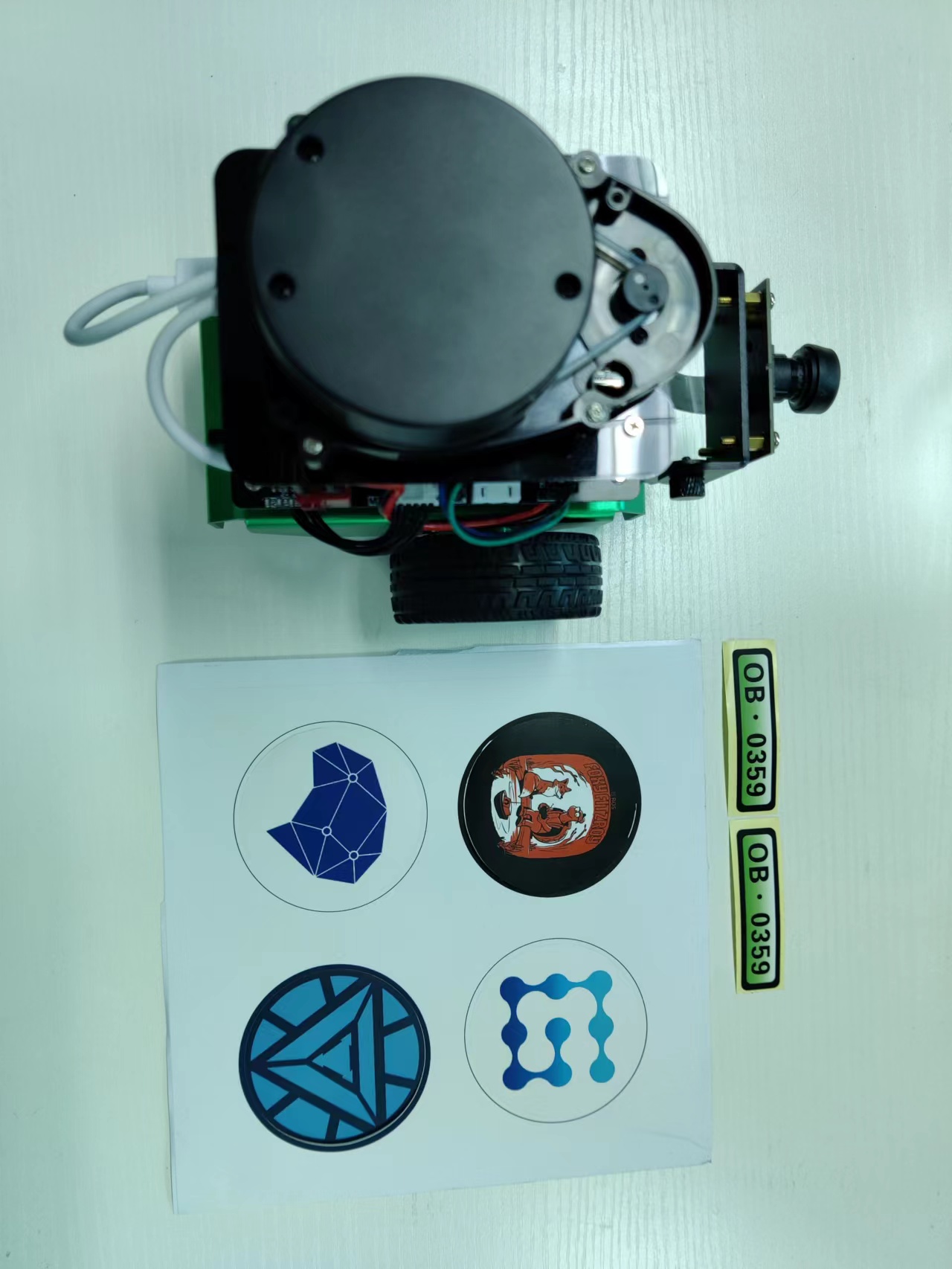
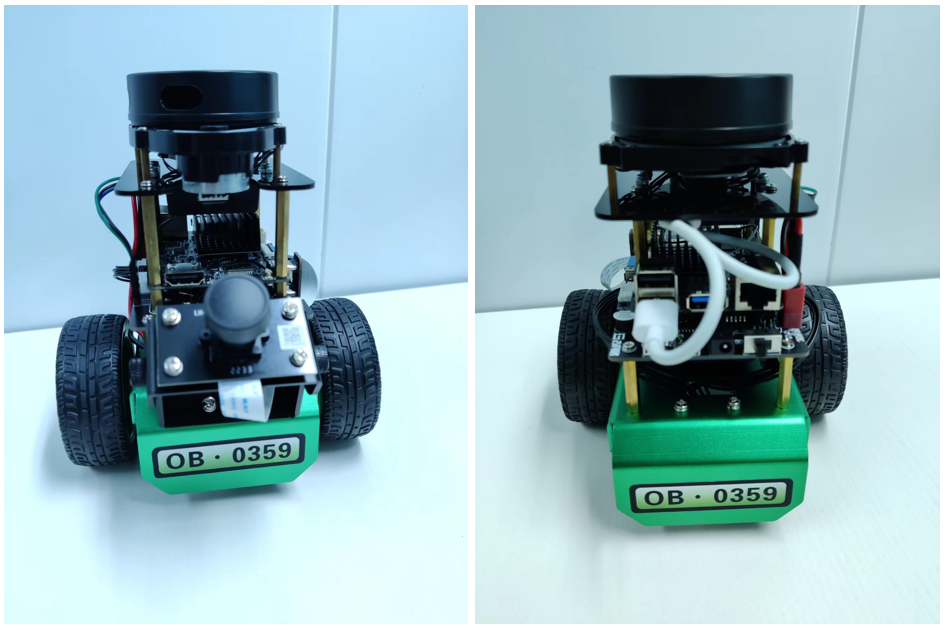
粘贴车牌
根据需要,将套件中附带的唯一编号贴纸粘贴到底盘的前后两侧。
粘贴雷达贴纸
根据需要,将套件中附带的雷达贴纸粘贴到激光雷达顶部。

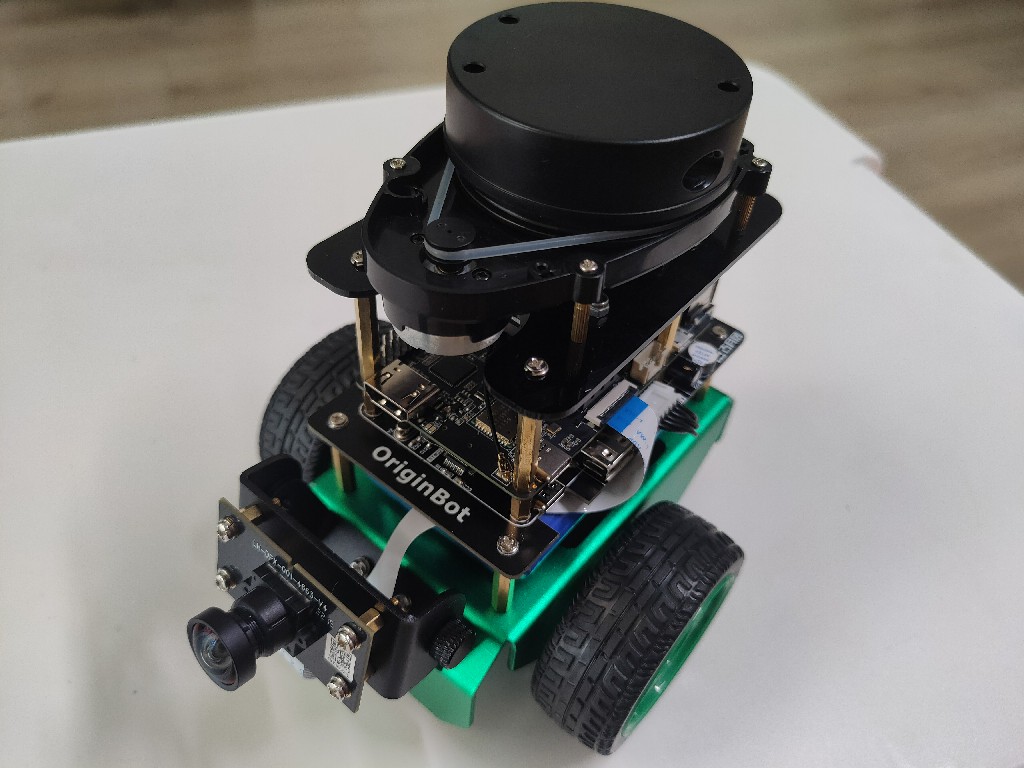
至此,OriginBot安装完成。