相机驱动与图像可视化
Hint
操作环境及软硬件配置如下:
- OriginBot机器人(视觉版/导航版)
- PC:Ubuntu (≥20.04) + ROS2 (≥Foxy)
相机驱动例程
在OriginBot的系统镜像中,已经内置了相机的驱动程序,为了确定相机连接正确并且被系统识别,我们先来运行系统自带的相机例程。
启动相机例程
SSH连接OriginBot成功后,在终端中输入如下指令:

Info
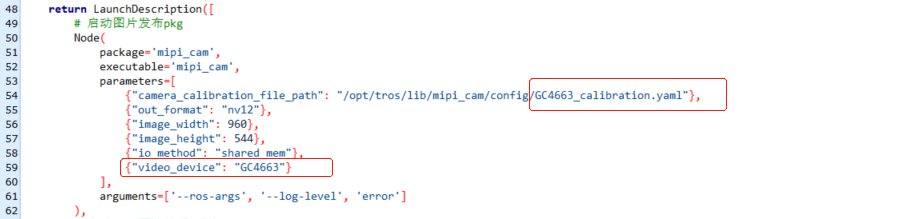
在2.x版本中,已实现系统通过I2C自动识别相机型号,可自由在F37、GC4663等型号切换设备。

上位机查看例程效果
运行成功后,在同一网络的PC端,打开浏览器,输入 http://IP:8000,选择“web展示端”,即可查看图像和算法效果,IP为OriginBot的IP地址。
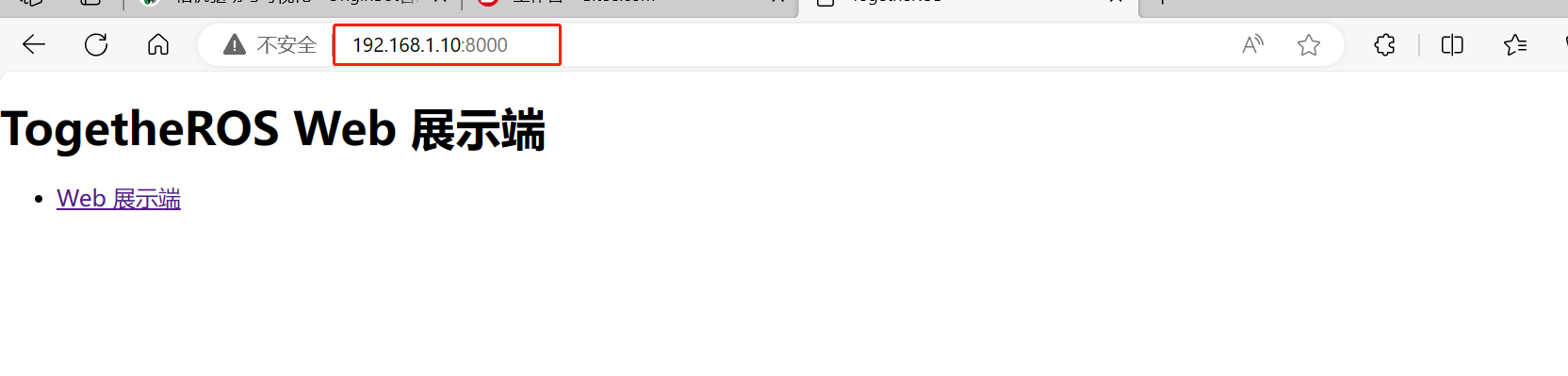
如相机被顺利驱动,我们不仅可以看到实时图像,还可以看到一个人体骨骼点识别的示例,说明相机运行正常。

关闭例程
该例程运行完毕后,请使用Ctrl+C关闭终端中运行的launch文件,释放摄像头硬件资源,便于后续例程使用,否则可能会出现相机设备无法找到的问题:

ROS图像传输
确认之前的相机例程已经关闭,接下来可以测试ROS2环境下的图像订阅与发布。
启动ROS相机驱动
SSH连接OriginBot成功后,在终端中输入如下指令:
$ export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
$ export CYCLONEDDS_URI='<CycloneDDS><Domain><General><NetworkInterfaceAddress>wlan0</NetworkInterfaceAddress></General></Domain></CycloneDDS>'
$ ros2 launch originbot_bringup camera.launch.py

Info
为了保证图像的实时性,这里我们将使用的DDS切换为cyclonedds,避免因为DDS的切片,导致图像延迟。cyclonedds默认会绑定某一网卡进行数据传输,此处我们使用第二句命令指定无线网卡wlan0作为绑定官网卡,大家可以根据实际情况,进行切换。更多信息,也可以参考DDS的配置。
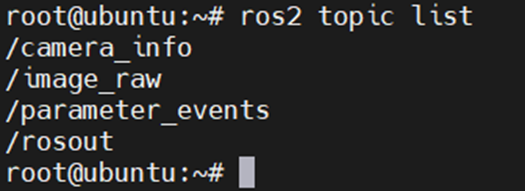
查看相机话题
运行成功后,可在机器人端或同网络下的PC端使用如下命令,确认图像话题已经正常发布。
查看可视化图像
在同一网络中的PC端,同样配置好使用的DDS,再使用rqt_image_view工具,就可以看到机器人的实时相机图像了。
$ export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
$ export CYCLONEDDS_URI='<CycloneDDS><Domain><General><NetworkInterfaceAddress>wlp2s0</NetworkInterfaceAddress></General></Domain></CycloneDDS>'
$ ros2 run rqt_image_view rqt_image_view

Info
此处我们使用第二句命令指定无线网卡wlp2s0作为绑定官网卡,该名称和电脑系统相关,可以使用ifconfig查询,大家可以根据实际情况,进行切换。更多信息,也可以参考DDS的配置。

除了 /image_raw 这个节点之外,/compressed_image 节点包含了经过压缩的 jepg 图片,在数据传输中效果更好,但由于 jepg 格式无法在 RVIZ 或者 rqt 中订阅所以增加 /bgr8_pub ,此节点是压缩后再还原成 bgr8 格式的发布节点,可以验证压缩图片的有效性。
在 RVIZ 中显示可以达到30fps。

附:DDS的配置
ROS2 Foxy默认使用的是fastdds,在图像传输的场景下,会受到限制,此时我们可以切换为cyclonedds。
DDS的安装
cyclonedds在OriginBot的镜像中已经配置好,如果想在电脑端配置的话,可以使用如下命令安装:
DDS的切换
在运行指令的终端中,使用如下指令设置DDS的环境变量,即可切换当前终端所使用的DDS:
cyclonedds默认会绑定某一网卡进行数据传输,如果需要切换绑定的网卡,可以继续在该终端中输入:
$ export CYCLONEDDS_URI='<CycloneDDS><Domain><General><NetworkInterfaceAddress>wlan0</NetworkInterfaceAddress></General></Domain></CycloneDDS>'
Hint
中间的参数就是绑定网卡的名字,按照实际需要,修改为eth0、wlan0,或者实际的网卡设备号。参考链接:http://www.robotandchisel.com/2020/08/12/cyclonedds/
使用如下指令,可以查看当前终端的所使用的DDS是否切换成功:

确定切换成功后,即可在当前终端中运行发布数据的节点了,比如相机发布者节点:
在运行的终端中,可以看到当前fastdds所绑定发布数据的网卡。

