车牌识别
Hint
操作环境及软硬件配置如下:
- OriginBot机器人(视觉版/导航版)
- PC:Ubuntu (≥20.04) + ROS2 (≥Foxy)
车牌识别
SSH连接OriginBot成功后,在终端中输入如下指令,启动车牌识别功能:
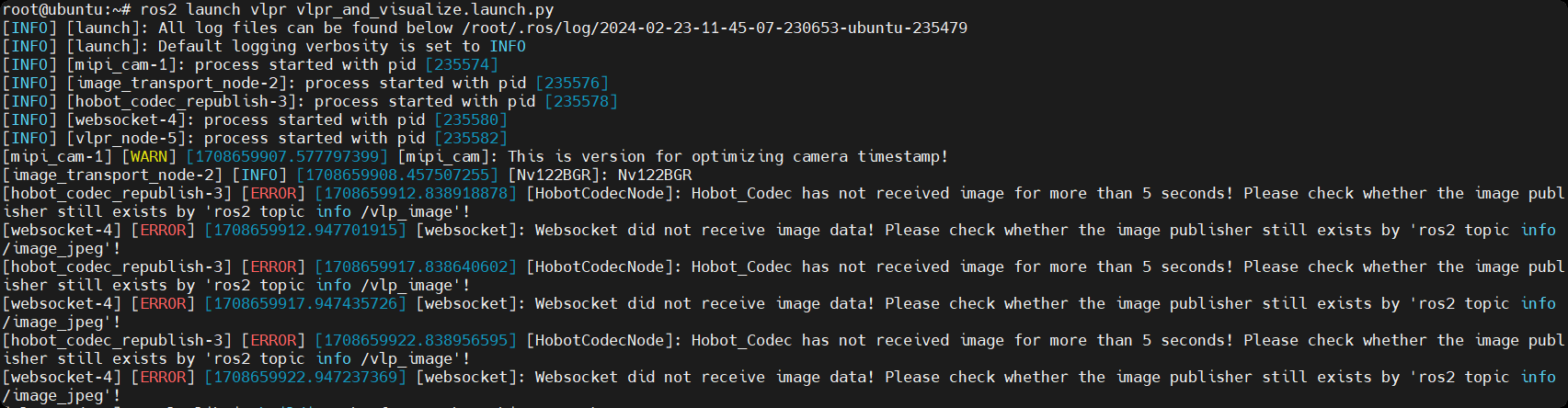

启动后web 端会警告无图像数据,需等待车牌识别功能完全启动,当[vlpr_node]显示successfully时启动完成
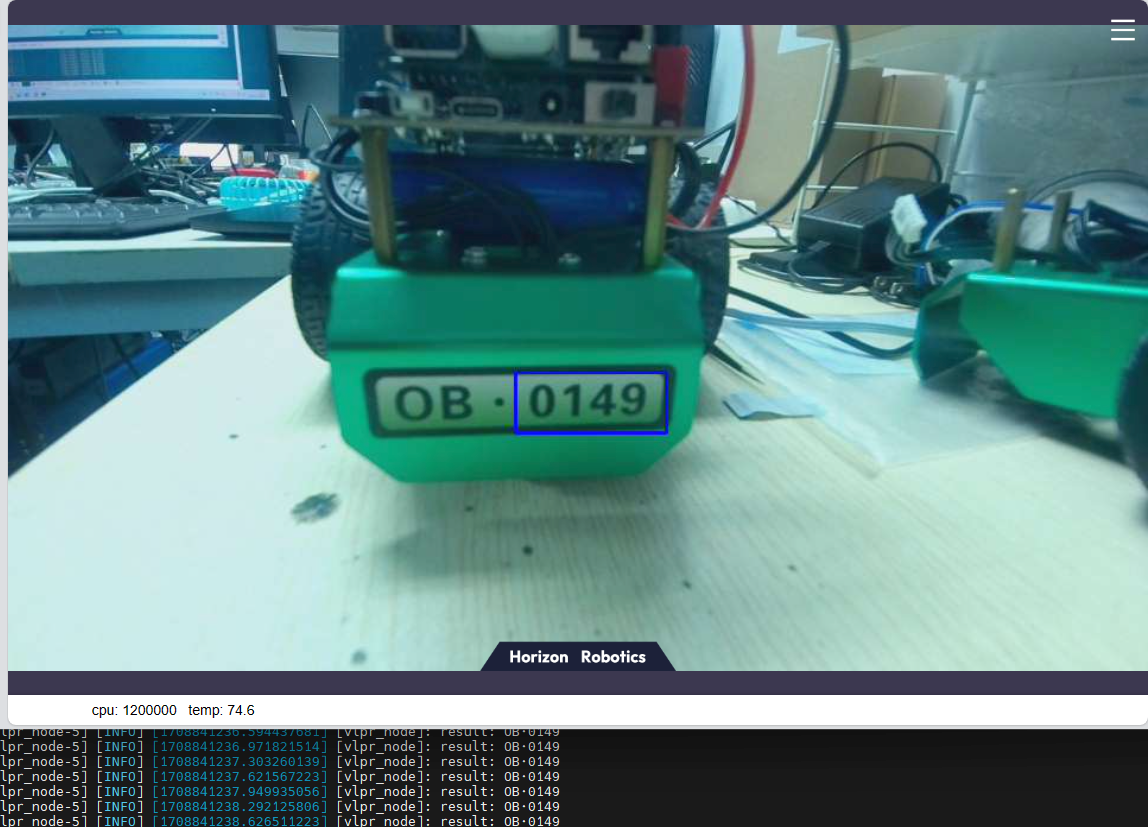
WEB端查看例程效果
运行成功后,在同一网络的PC端,打开浏览器,输入 http://IP:8000 ,选择“web展示端”,即可查看图像和识别效果,IP为OriginBot的IP地址。
原理简介
车牌识别功能为通过检测车牌轮廓,并识别轮廓内的数字实现,由MIPI图像采集、字符轮廓检测、OCR、图像编解码、WEB展示端组成,流程如下图:
