QR Code Detection and Tracking
Hint
The operating environment and hardware configuration are as follows:
-
OriginBot Robot (Lite/Standard/Pro versions)
-
PC: Ubuntu (≥22.04) + ROS2 (≥humble)
In our daily lives, one of the most common image recognition scenarios is scanning QR codes.
Whether it's logging into WeChat, making mobile payments, or unlocking shared bikes, QR code scanning has become ubiquitous. Beyond these everyday applications, QR codes are also widely used in industrial production, such as marking material models or storing production information. By simply scanning a QR code with a camera, the corresponding information can be quickly retrieved.
QR codes can store a lot of information. Can they be combined with robots? For example, when a robot recognizes different QR codes, it can perform corresponding actions.
Next, let's try enabling the robot to recognize QR codes and follow their movement.
QR Code Detection
After successfully connecting to the OriginBot via SSH, enter the following command in the terminal to start the QR code detection feature:

To open the camera, enter the following command:
To enable web display, run:
ros2 run websocket websocket --ros-args -p image_topic:=/image_jpeg -p image_type:=mjpeg -p only_show_image:=true & ros2 launch hobot_codec hobot_codec.launch.py codec_in_mode:=ros codec_in_format:=bgr8 codec_out_mode:=ros codec_out_format:=jpeg codec_sub_topic:=/qr_code_image codec_pub_topic:=/image_jpeg
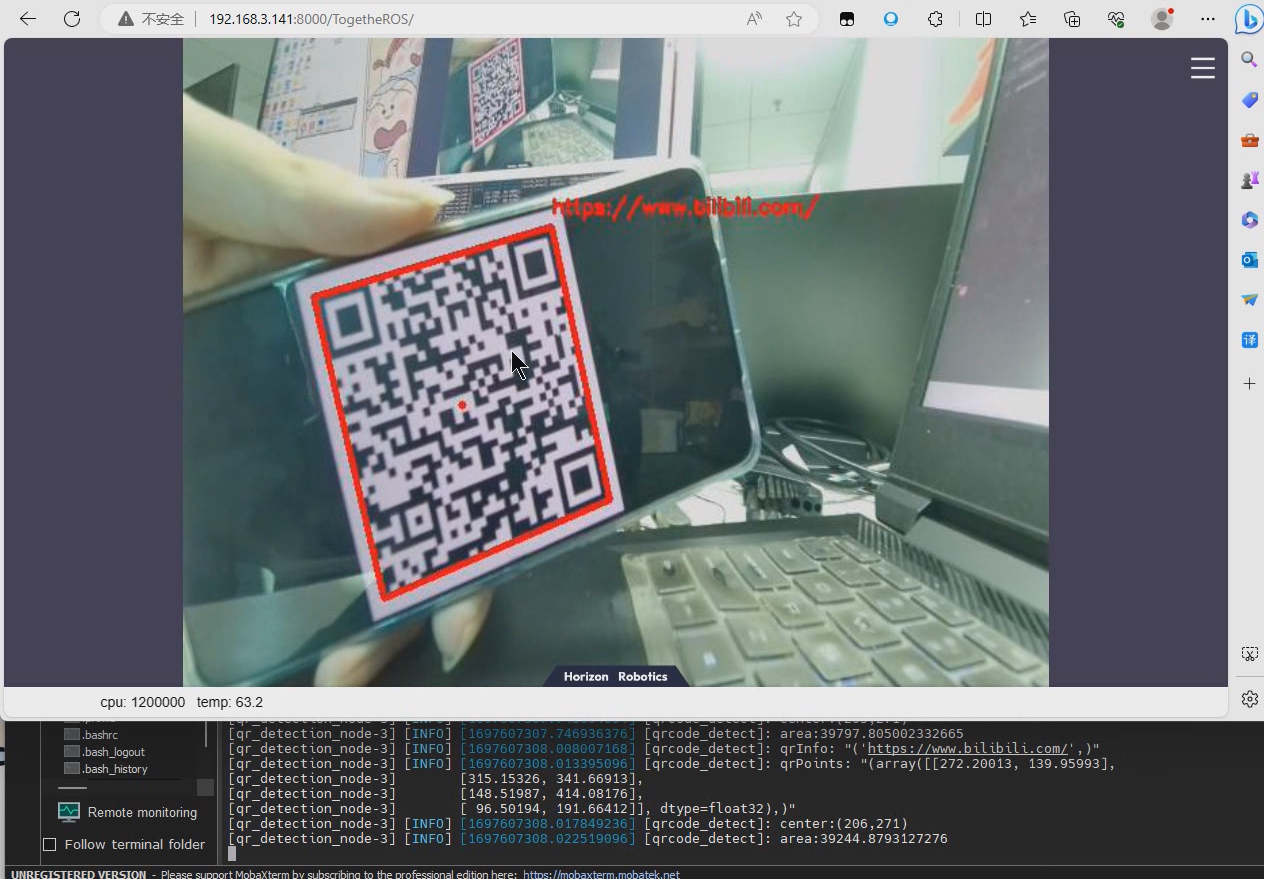
Viewing the Example on the Web
Once successfully running, open a browser on a PC connected to the same network, enter http://IP:8000, and select "Web Display" to view the image and algorithm results. Replace IP with the IP address of the OriginBot.
QR Code Tracking
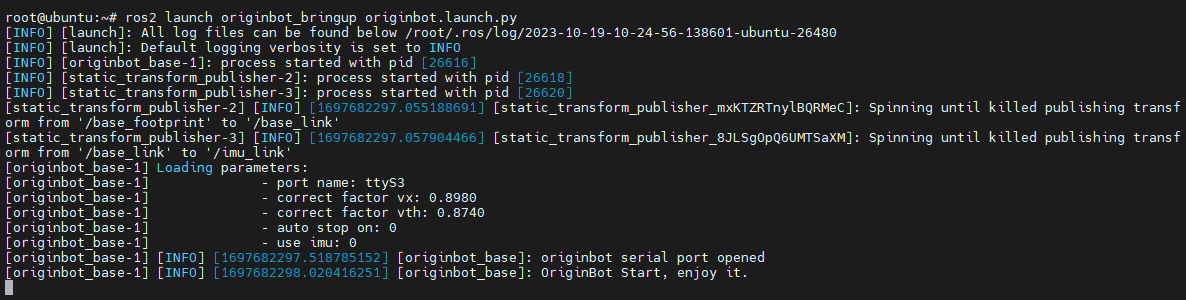
Starting the Chassis
After successfully connecting to the OriginBot via SSH, enter the following command in the terminal to start the robot chassis:
Starting the QR Code Control Node
Close the QR code detection node, then enter the following command in the terminal to start the QR code control node:
To open the camera (if not already opened), run:
To enable web display (if not already enabled or not needed, this step can be skipped), run:
ros2 run websocket websocket --ros-args -p image_topic:=/image_jpeg -p image_type:=mjpeg -p only_show_image:=true & ros2 launch hobot_codec hobot_codec.launch.py codec_in_mode:=ros codec_in_format:=bgr8 codec_out_mode:=ros codec_out_format:=jpeg codec_sub_topic:=/qr_code_image codec_pub_topic:=/image_jpeg
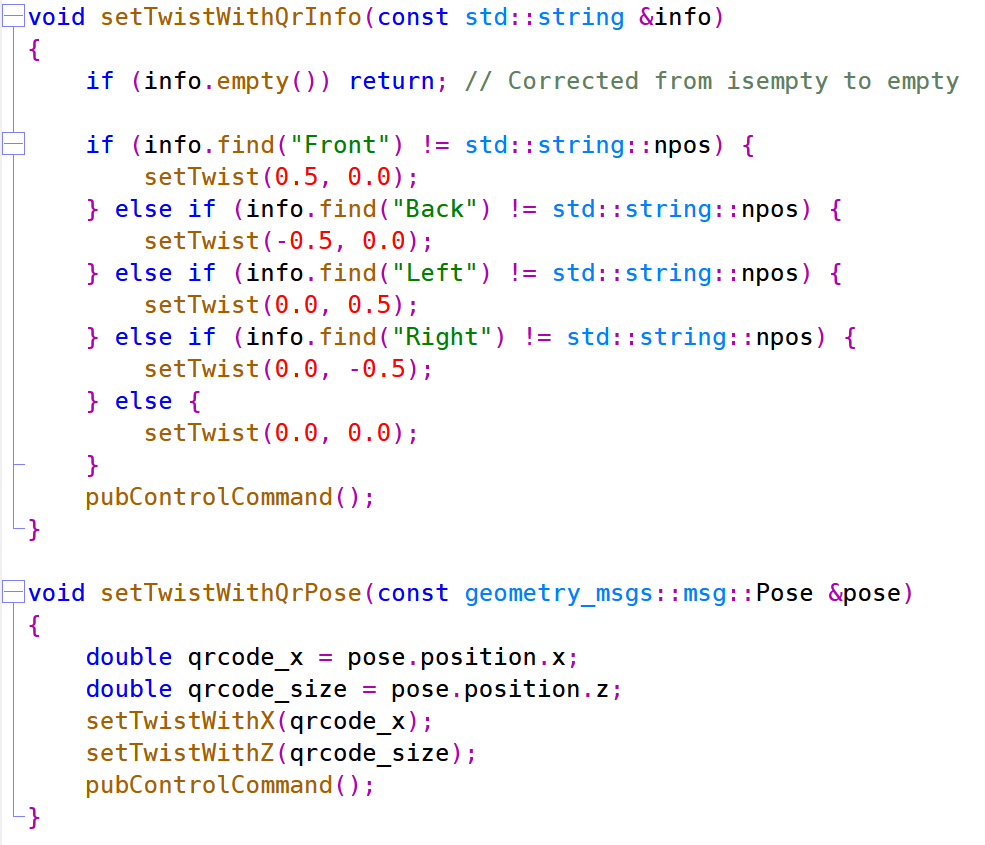
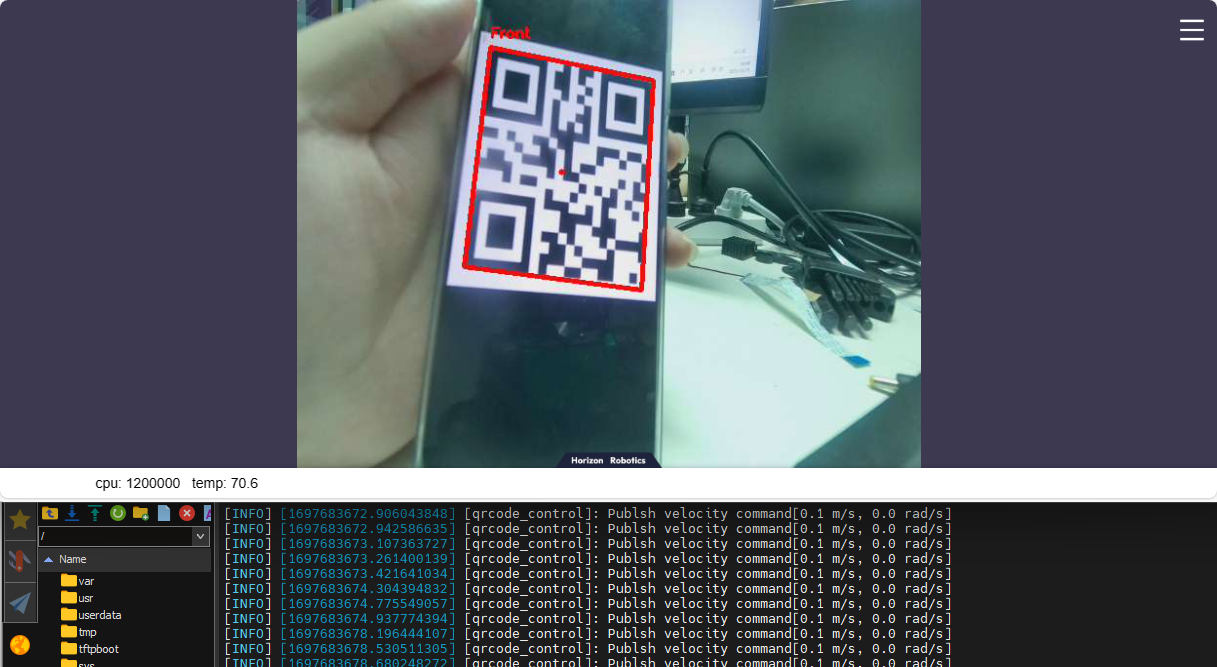
QR Code Control
By default, the robot recognizes QR code content such as Front, Back, Left, and Right to control the robot's movement. You can use the following QR codes to control the robot:
 |
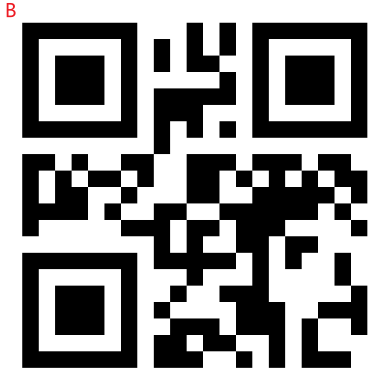 |
|---|---|
 |
 |
Viewing the Control Mode
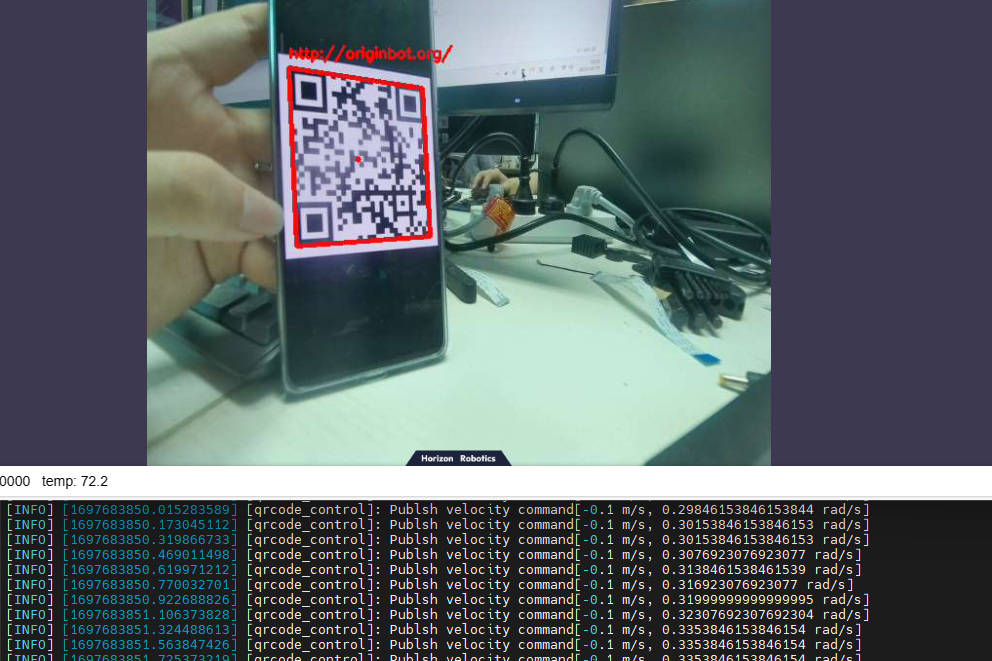
You can also track the relative position of the QR code to follow it.
Enter the following command in the terminal to view the control mode:
ros2 param get /qrcode_control control_with_qrcode_info
# False: Does not recognize QR code content, only follows the QR code's position
# True: Recognizes QR code content and executes commands based on it

Modifying the Control Mode
Enter the following command in the terminal to modify the control mode:

In this mode, the robot will follow the relative position of the QR code and adjust its speed accordingly.
You can adjust the movement speed in the qrcode_control.cpp file: