SLAM Map Building (Gazebo)
Hint
The operating environment and software and hardware configurations are as follows:
- PC:Ubuntu (≥22.04) + ROS2 (≥humble)
Start the Gazebo simulation environment
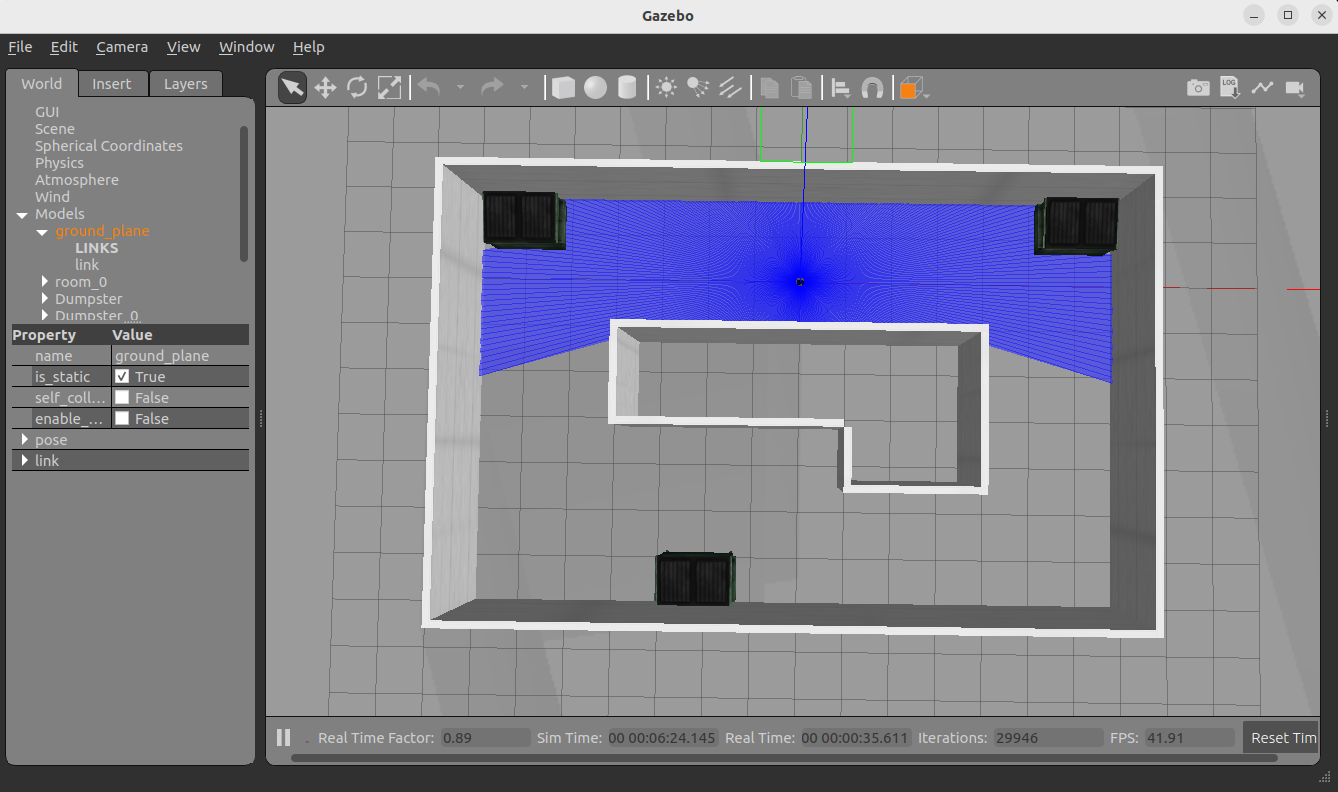
Open a new terminal on the PC and enter the following command in the terminal to start the Gazebo simulation environment:
After a short wait, you will see the simulation environment containing the robot model after successful startup:
Start SLAM and visualization
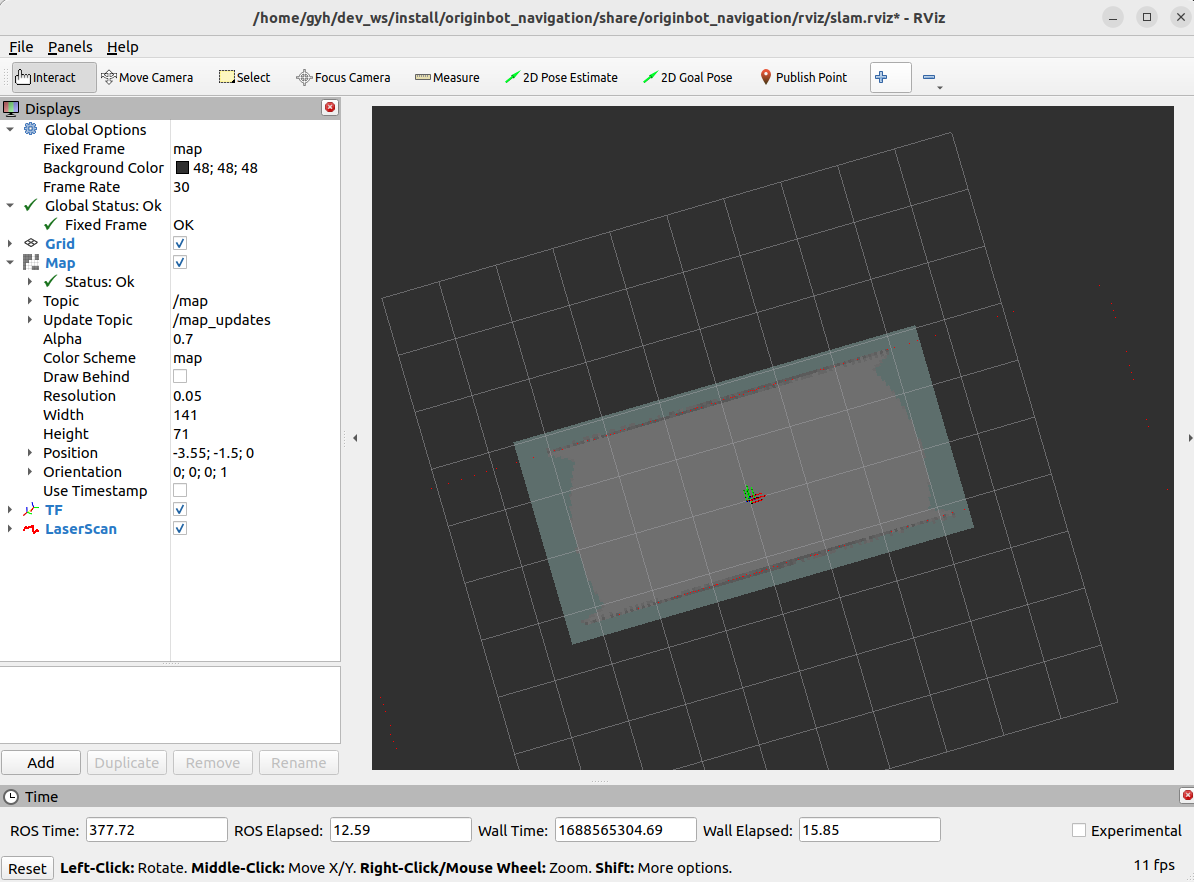
Open a new terminal on the PC and enter the following command in the terminal to start the cartographer mapping algorithm:
Hint
Make sure that the originbot_desktop code repository has been downloaded and compiled on the PC. If it is inconvenient to use the originbot_desktop code repository, you can also use "ros2 run rviz2 rviz2" to start Rivz2 separately, and manually add display plug-ins such as map, tf, laserscan, etc. to achieve similar results.
Keyboard control mapping
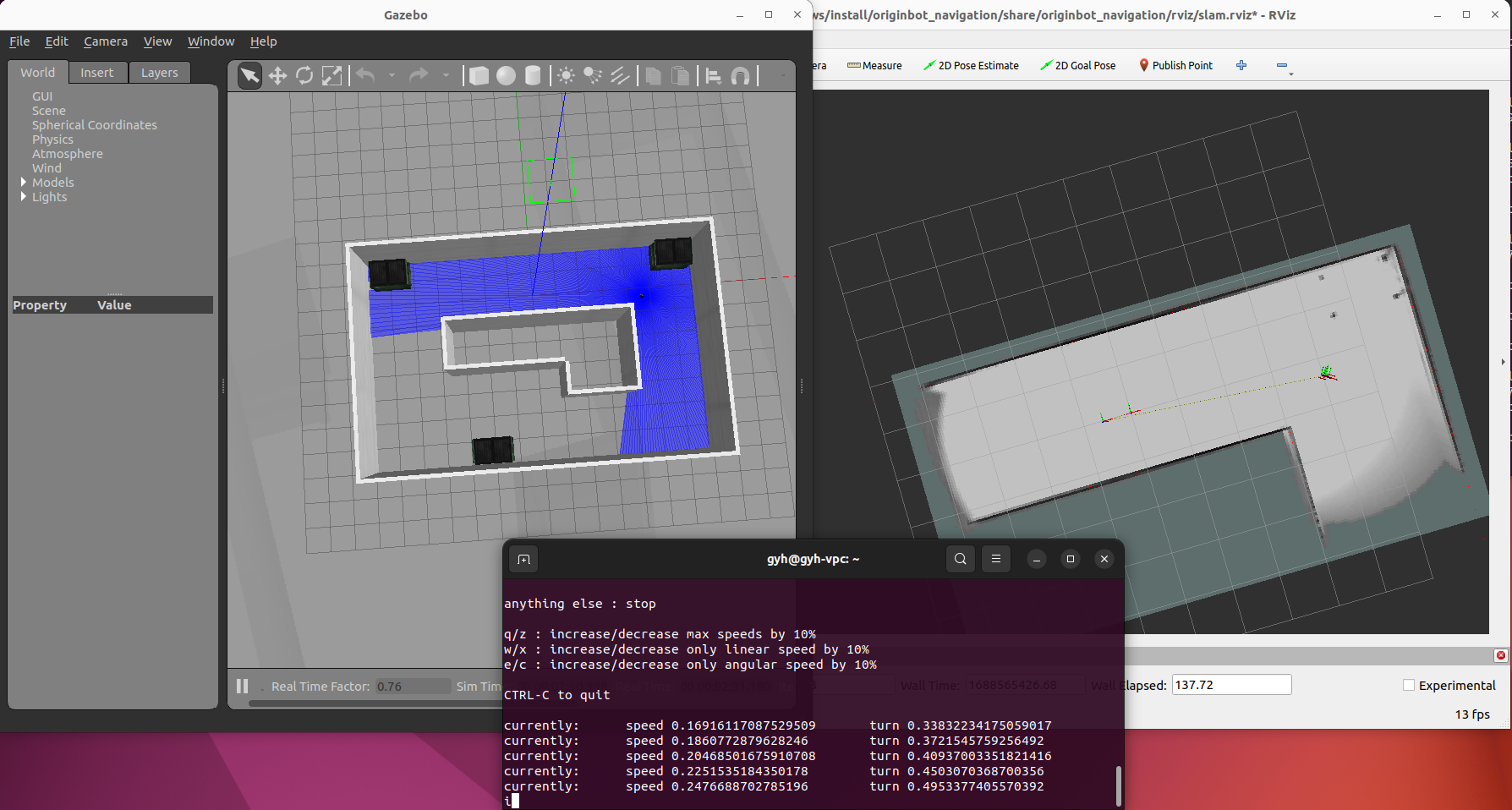
In order for the robot to establish complete information about the surrounding environment, we also need to start a keyboard control node:
Now, we can click the up, down, left, and right keys on the keyboard in the keyboard-controlled terminal to control the robot to explore the unknown environment. The full picture of the map will gradually appear in Rviz.
Save the map
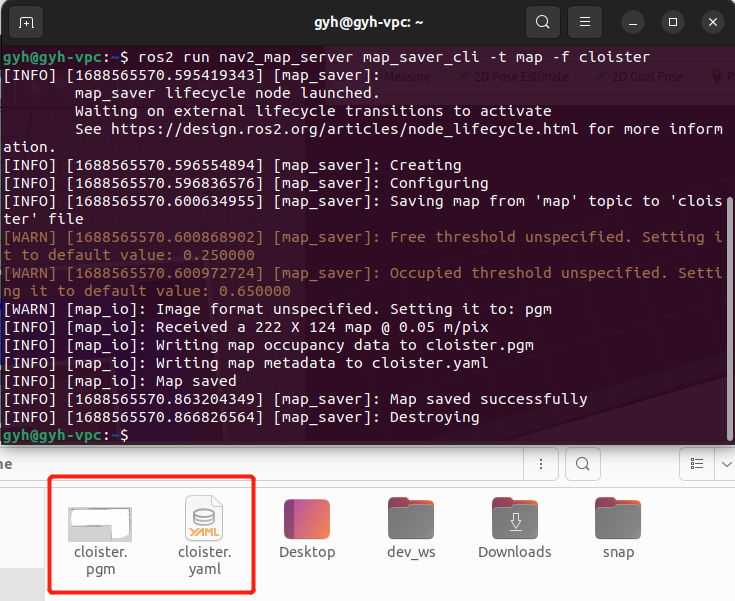
After the map is built, you can use the following command to save the map:
Info
The above command will save the map to the current path of the terminal. Before using it for subsequent navigation, it needs to be copied to the originbot_navigation function package.
